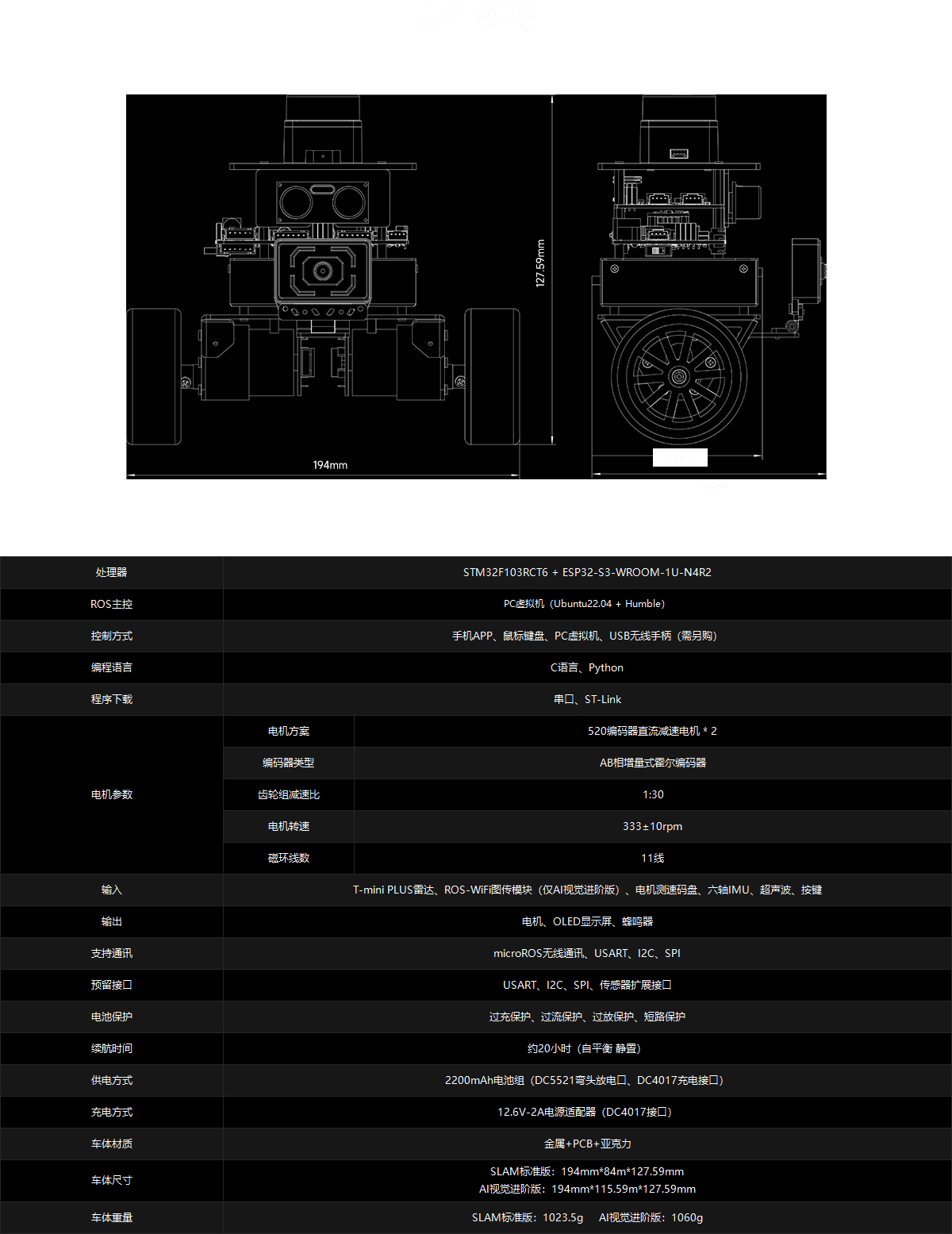
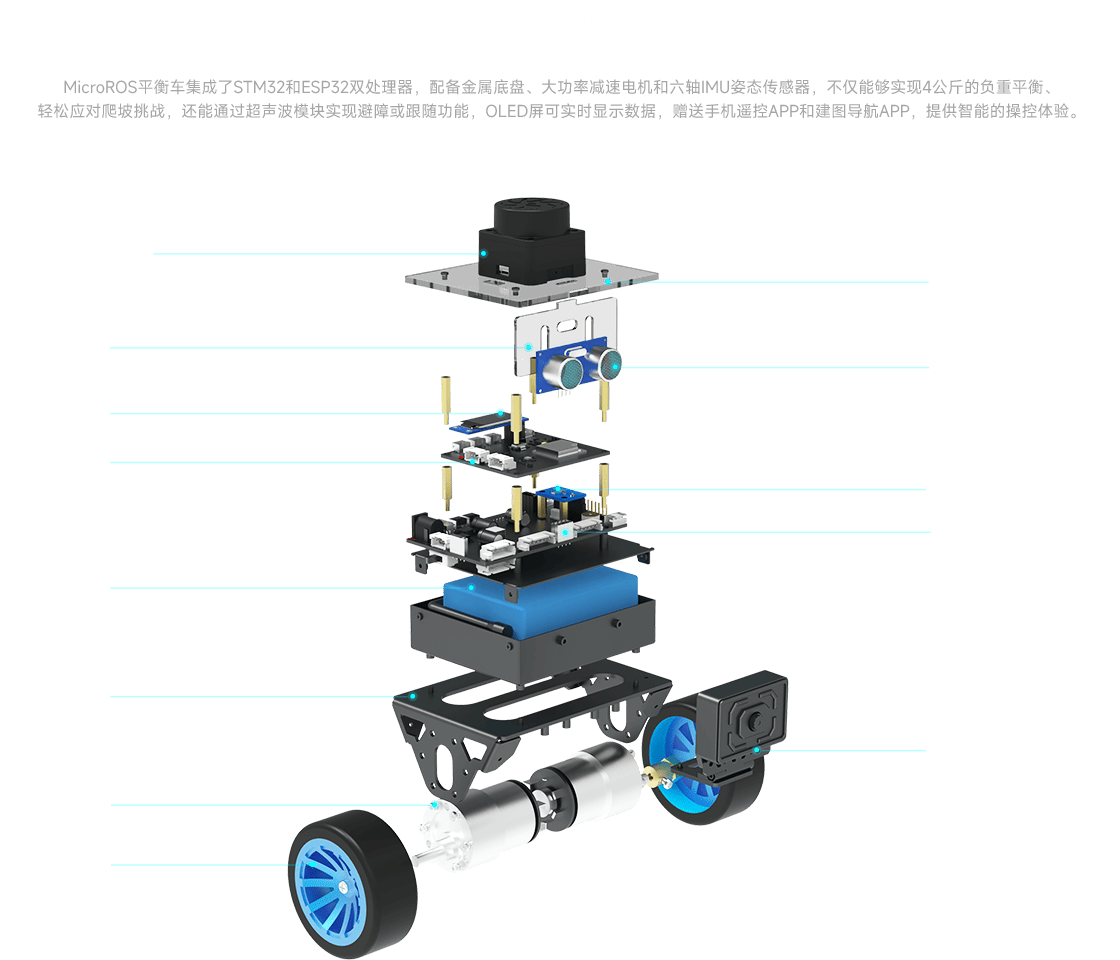
MicroROS平衡小车
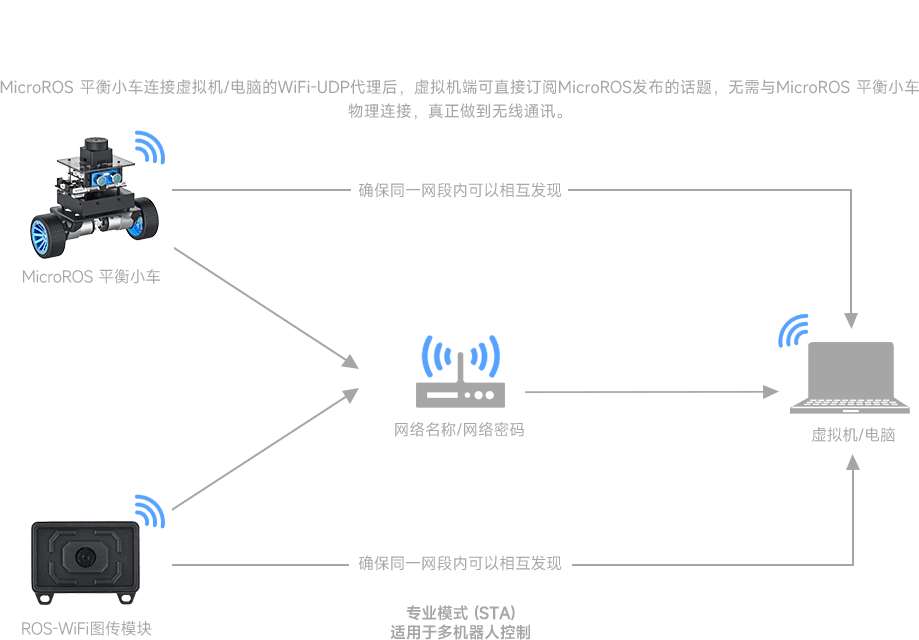
搭配ROS-WiFi图传模块,支持将图像数据通过局域网传输至PC虚拟机,由虚拟机进行图像处理任务。
T-mini Plus采用TOF测距方式,抗60Klux的强光照射,支持室内、室外建图导航测量半径可达12m,测量盲区仅为5cm,测距误差±20mm,采样频率4000次/s,扫描频率6Hz~12Hz,支持230400bps通讯速率,测量速度既快速又准确。
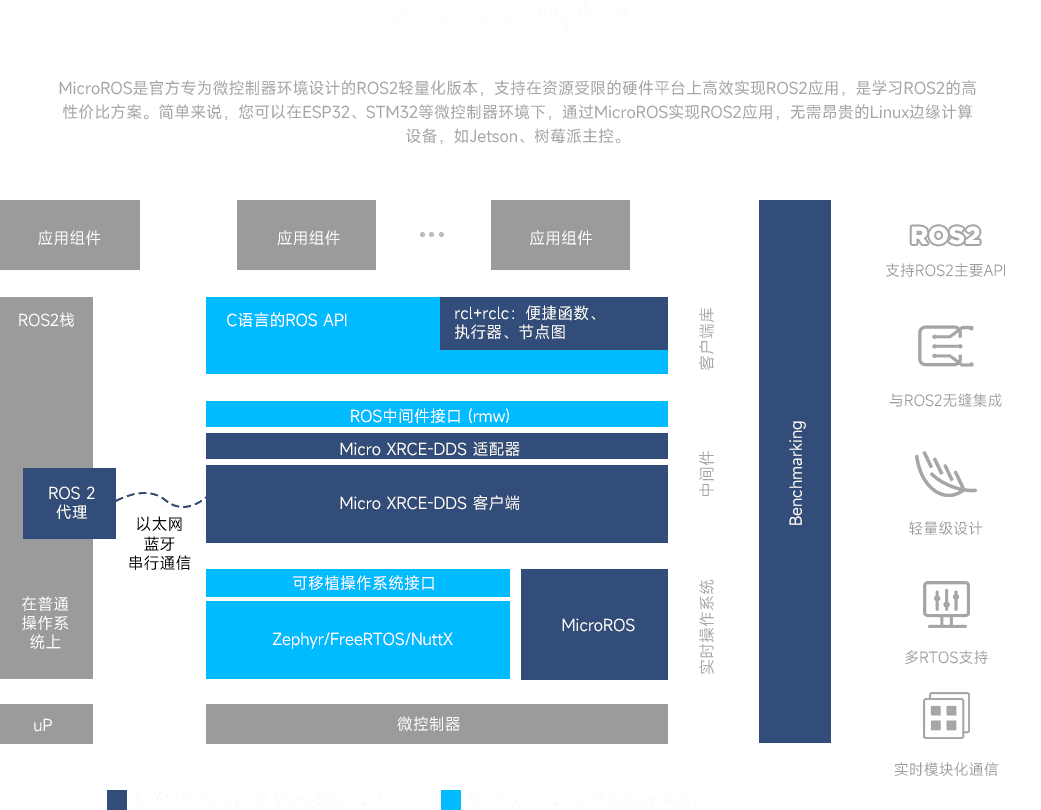
ESP32通信板板载ESP32-S3-WROOM-1U-N4R2芯片,支持microROS无线通讯,可将电机、陀螺仪、雷达等多项传感器数据实时透传至虚拟机ROS主控,实现底盘与虚拟机之间的高效通讯。
STM32控制板搭载STM32F103RCT6芯片,能够高效驱动电机、处理陀螺仪数据,并获取电机码盘反馈数据,确保平衡车的稳定性和平衡性能,板载丰富的扩展接口,支持多种外设连接。
采用11线AB相增量式霍尔编码器进行平衡辅助控制,编码器数据线带屏蔽磁环,精度高、抗干扰能力优秀,如此高的精度让平衡小车游刃有余。
2mm厚度金属板,表面烤漆磨砂处理,配备大功率带AB相编码器减速电机。
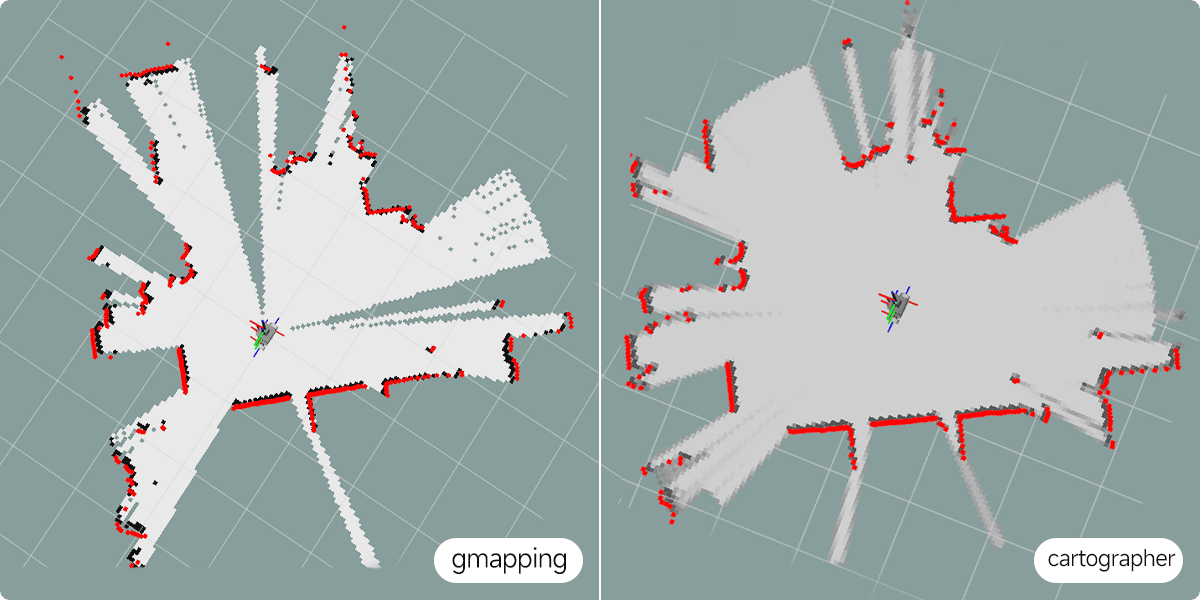
MicroROS平衡车支持gmapping、cartographer两种算法建图。
支持路径规划,单/多点自主导航与导航避障。
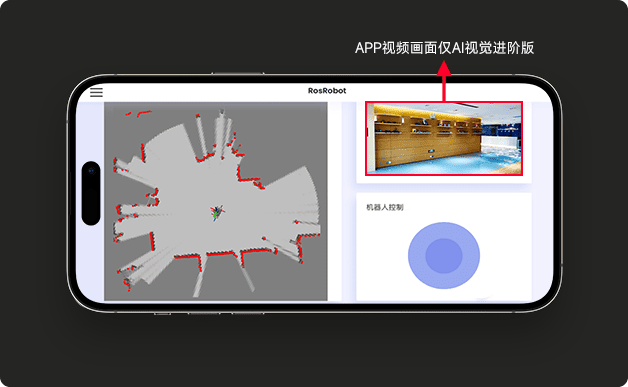
可以在手机APP上查看建图情况,也可以通过APP完成自主导航避障。
通过雷达检测平衡车与墙边距离,实现雷达循墙边超长直线贴墙行走。
雷达扫描周围环境,车头将始终朝向最近的目标。
通过雷达检测周围环境,小车跟随最近的目标进行运动。
小车在巡逻路线上使用雷达扫描周边信息,当遇到障碍物时停车。
通过雷达扫描障碍物信息,平衡车运动时遇到障碍物后将避开障碍物。
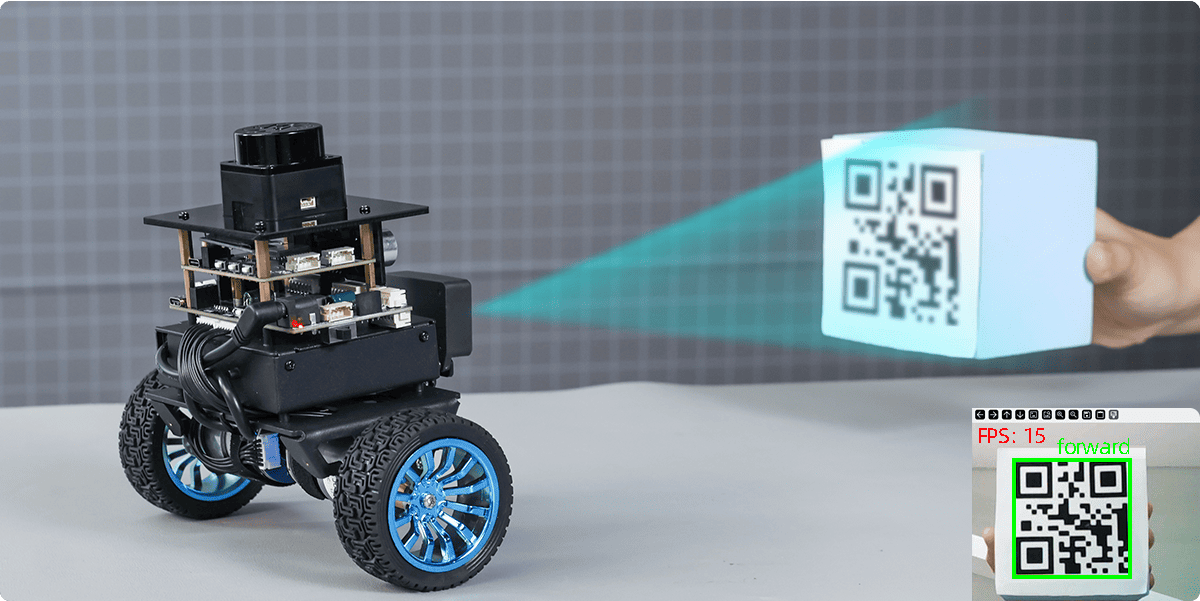
识别二维码内容,并执行二维码中的前进后退等指令动作。
识别画面中的手掌,并左右移动追踪手掌。
识别画面中不同的手势,并完成指定动作。
识别画面中的人脸后进行标记并左右移动追踪人脸。
识别画面中的人体姿态并左右移动追踪人体。
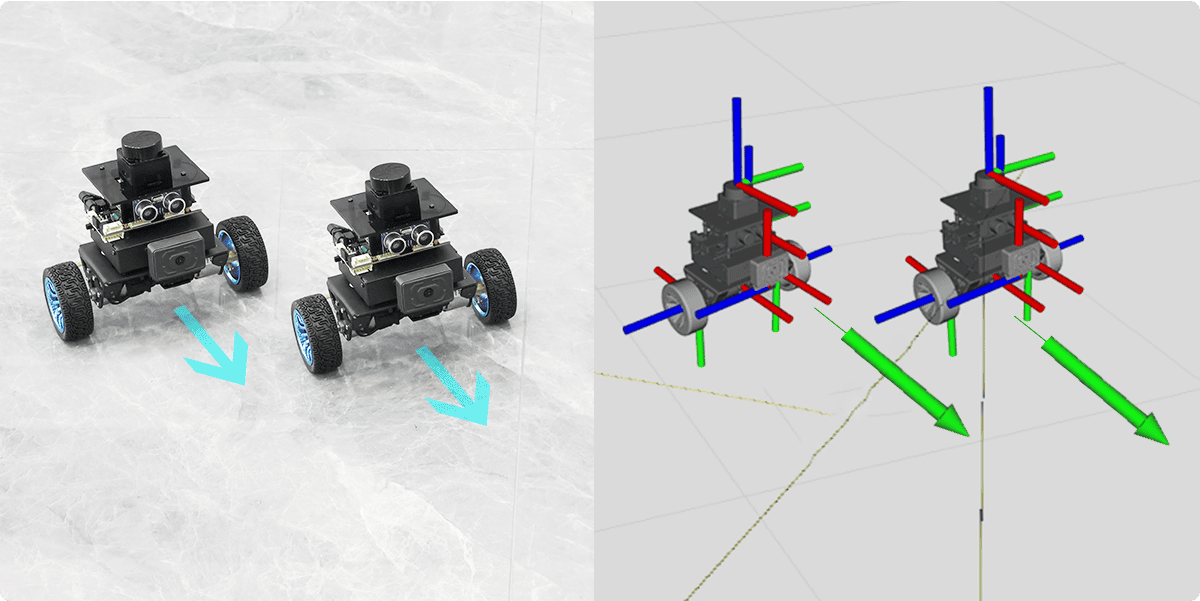
多台平衡车在同一地图下,完成单点导航与多点导航,动态避障。
一个手柄实时控制多台平衡车,完成整齐划一的动作。
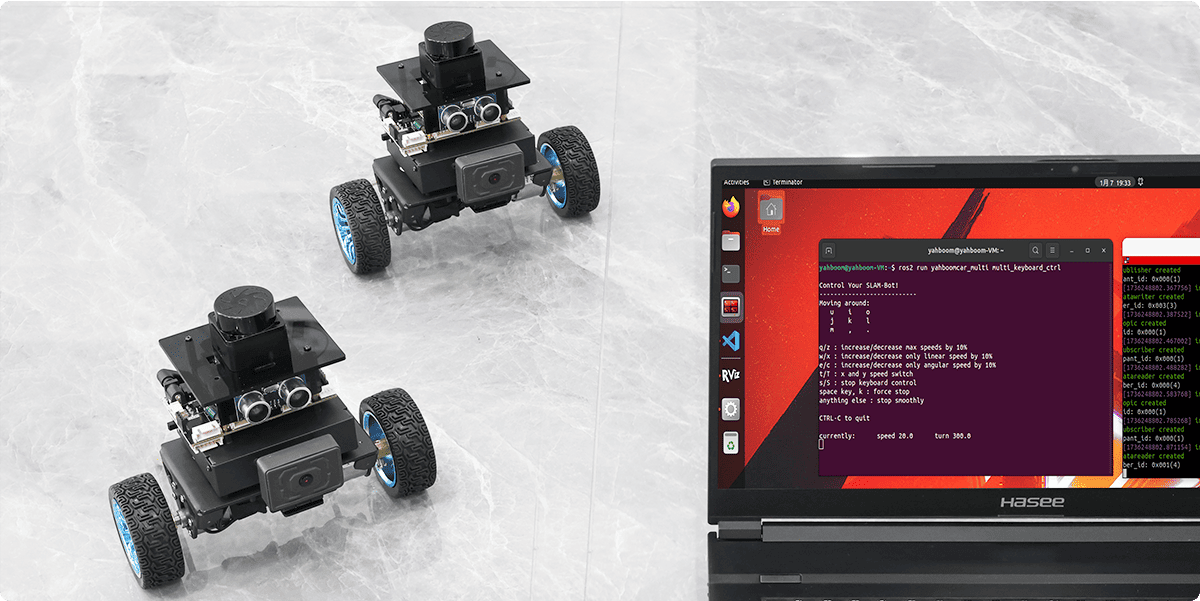
键盘实时控制多台平衡车,完成整齐划一的动作。
读取IMU数据和速度数据,输出融合IMU的Odom数据。
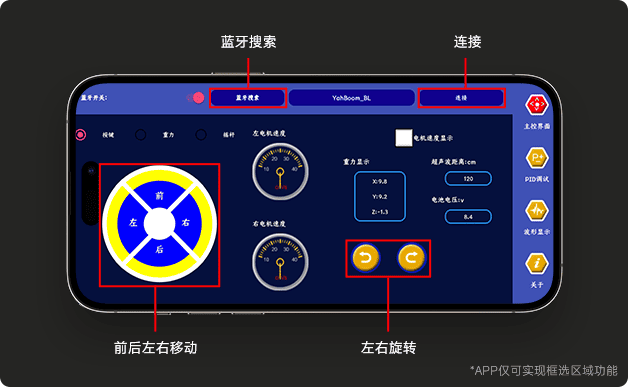
可蓝牙控制小车前后左右运动。
键盘控制小车前后左右运动。
手柄控制小车前后左右运动。
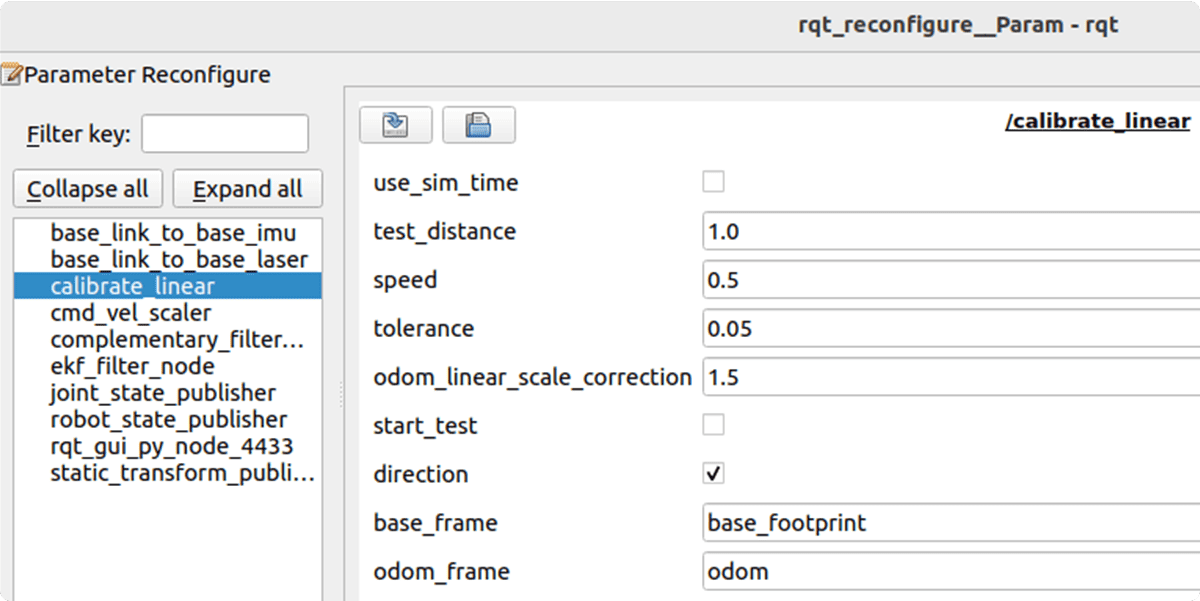
可调整参数校准小车的线速度和角速度。
借助高性能六轴IMU,小车能够检测到放置在地面的动作,并自动启动平衡系统。而当小车处于直立状态并被垂直提起时,会通过六轴IMU识别这一动作并自动关闭平衡系统。
平衡车采用三层结构设计,上层平台可随意载物/DIY拓展。搭配1:30减速比大扭矩编码器电机,可实现负载重量高达4KG,超越自重4倍,负重同时仍可以进行遥控。
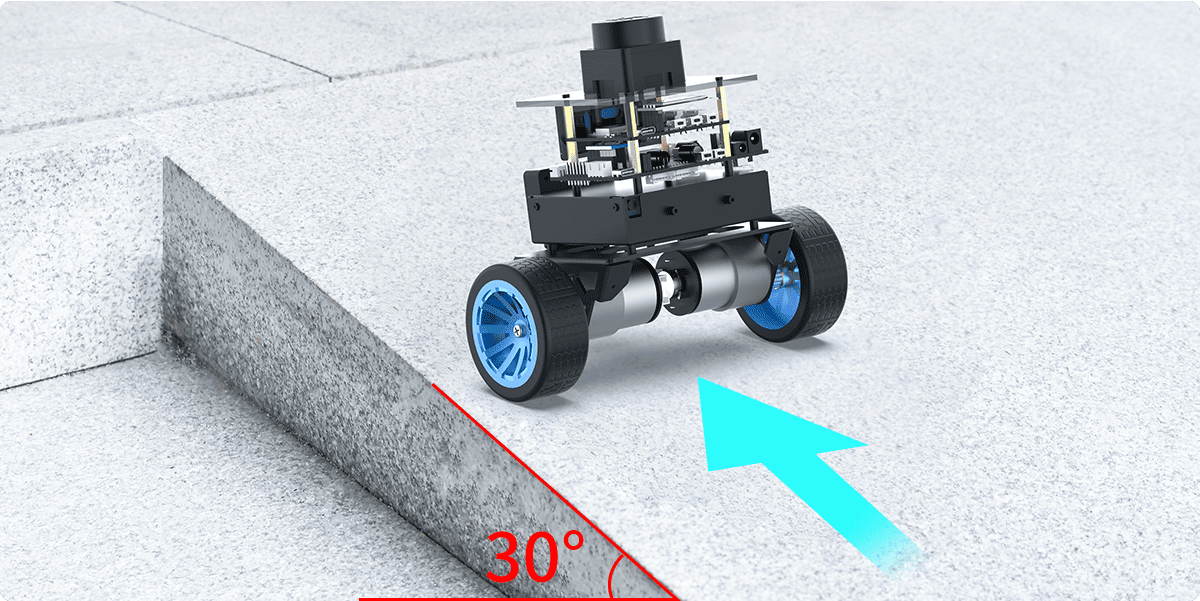
凭借卓越的平衡能力和强劲的动力系统,平衡车能够轻松克服30°左右的坡度挑战,确保行驶过程中的平稳与安全。
小车具备超声波避障和跟随功能,可以在两者间自由切换,避障模式下,小车可以躲避前方障碍物。跟随模式下,小车可以跟随前方的指引物。
配备OLED显示屏,支持显示WiFi连接状态和虚拟机ROS主控的IP地址。
支持安卓/iOS手机APP控制
支持安卓手机APP控制
亚博智能配备精心研发的配套课程资料,提供基础理论知识与实操案例教程,内容由浅入深,方便用户快速上手学习。
亚博智能精心打造代码级视频教程,视频包含原理讲解、代码讲解、实操演示及实验现象,助力开发者轻松掌握平衡车开发技术。
程序代码开源,让技术更自由,让创新更简单。

.png)
.png)
.png)
.png)
.png)
.png)

































.png)
.png)
.png)