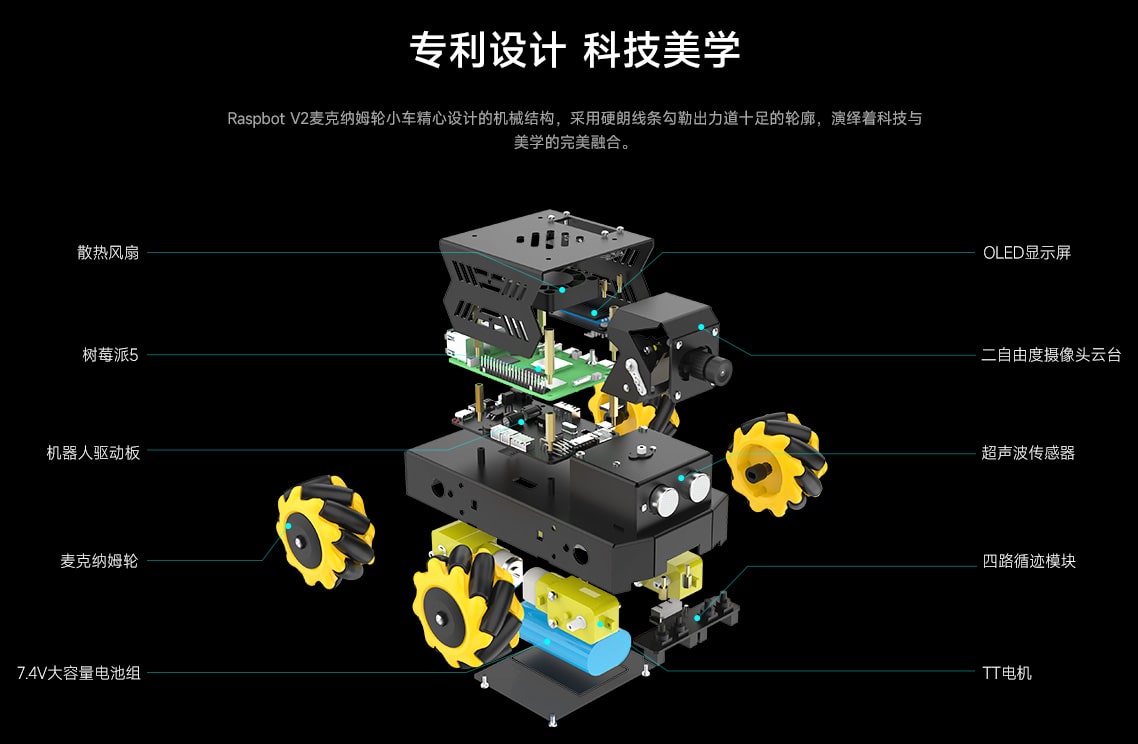
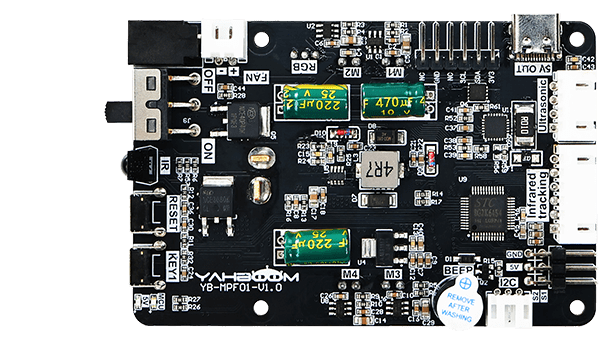
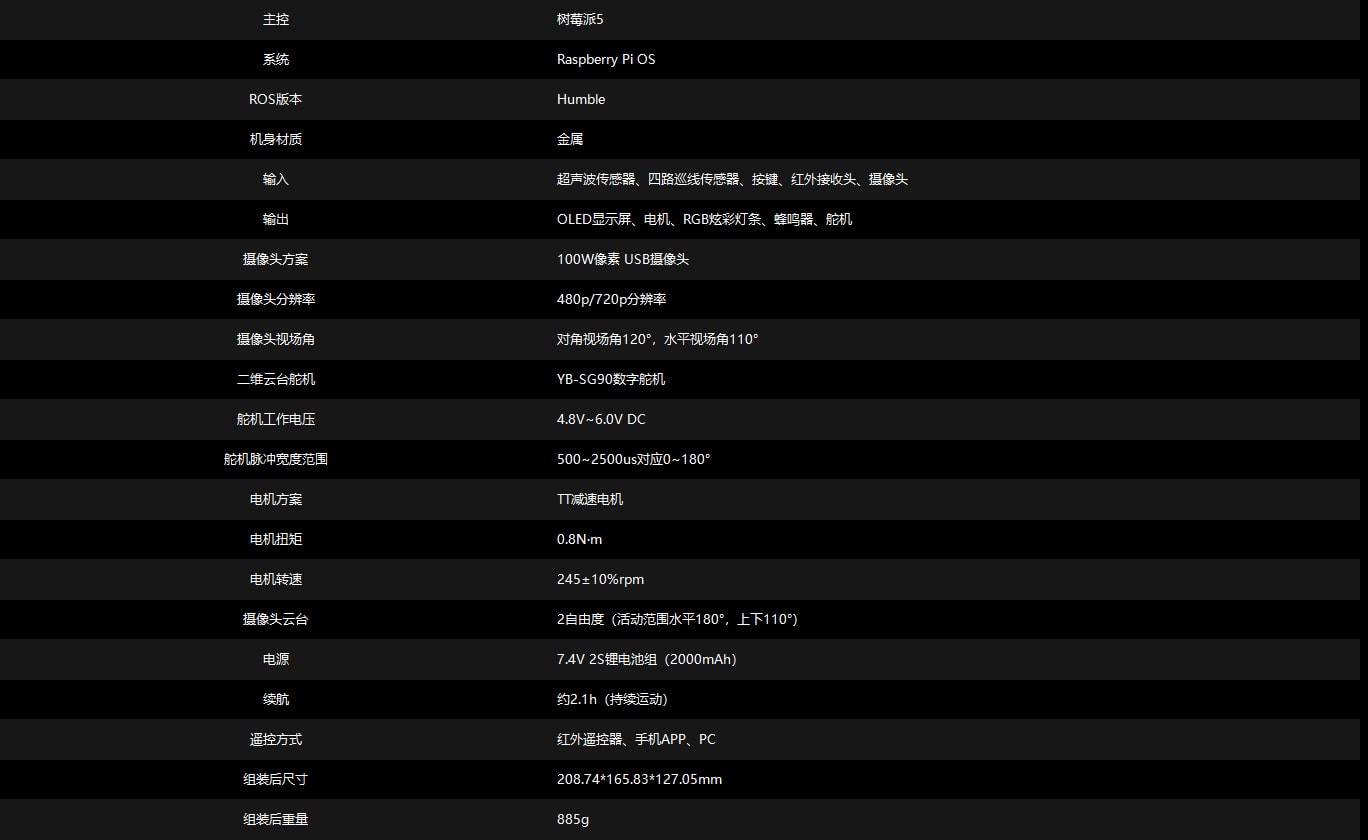
Raspbot V2 AI视觉小车
搭载树莓派5机器人驱动板,通过I2C与树莓派5通信,从而驱动舵机、电机、传感器等多种外设。Type-C供电接口支持树莓派5 PD(5V/5A)供电规范,出厂自带外设驱动固件程序,用户可直接调用驱动API,使用简单又高效。
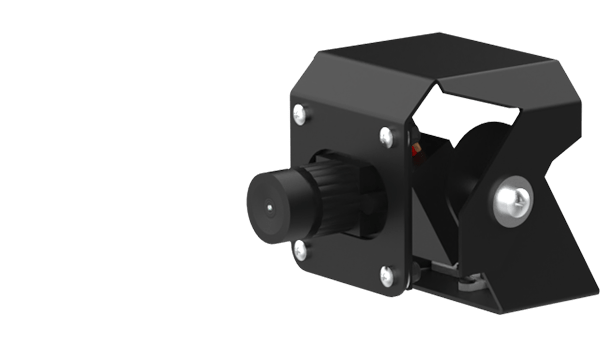
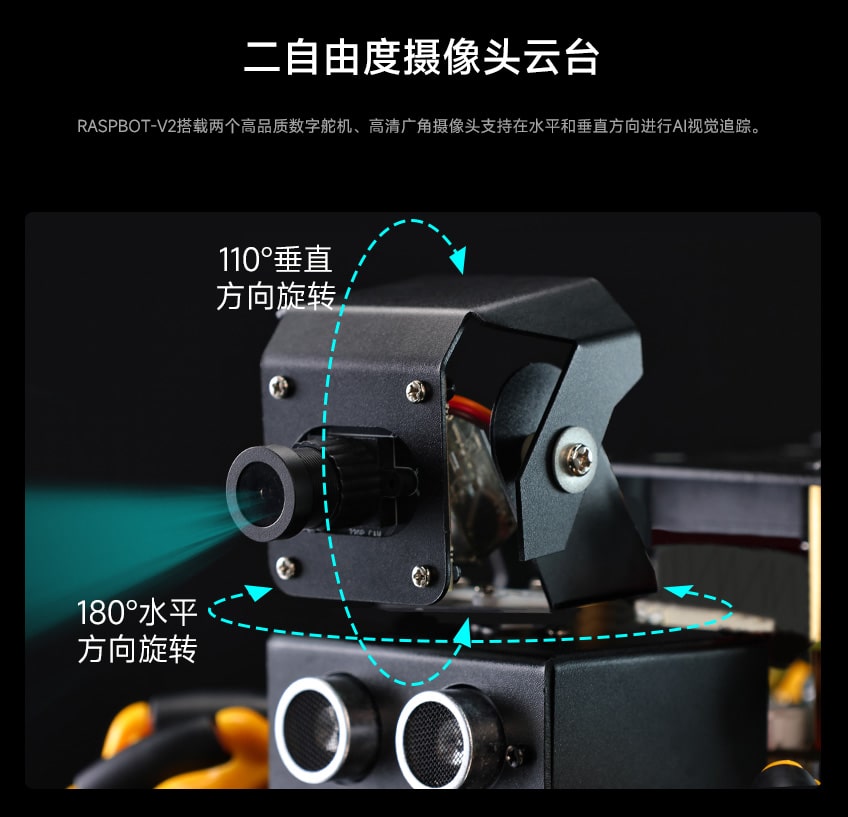
二自由度云台采用高品质数字舵机,实现精度更高,寿命更长,支持在水平和垂直方向上灵活移动。
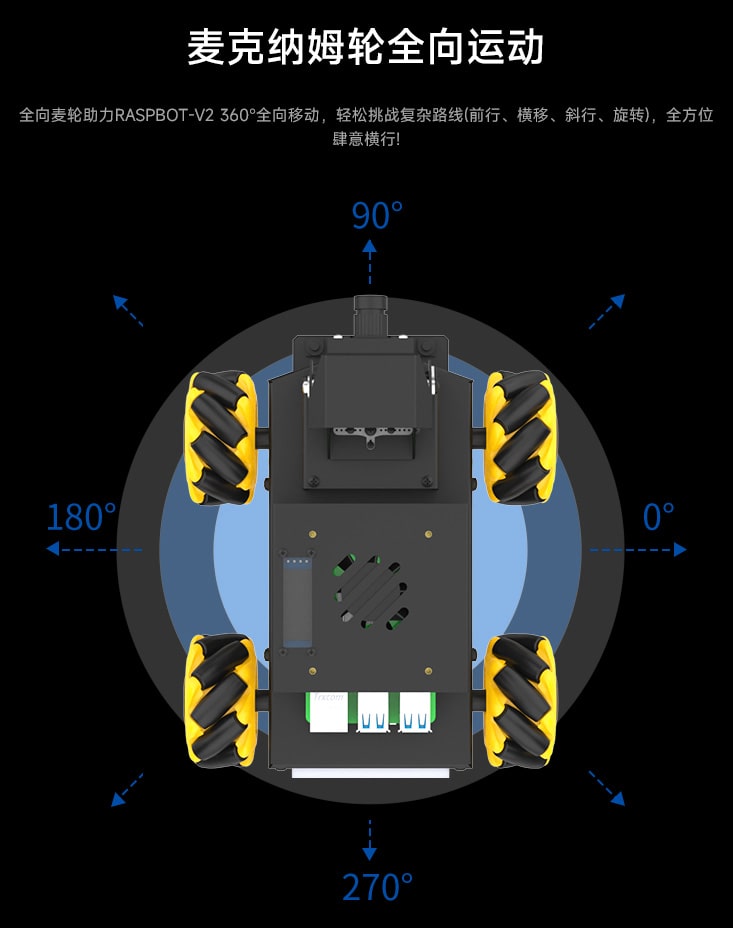
搭载110度广角摄像头,100万图像像素,配合灵活运动的小车,视觉范围可达360°全方位无死角。
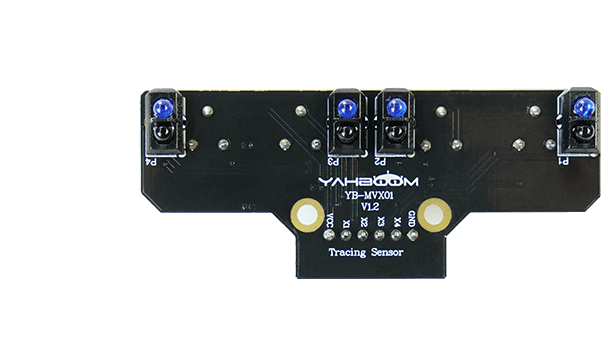
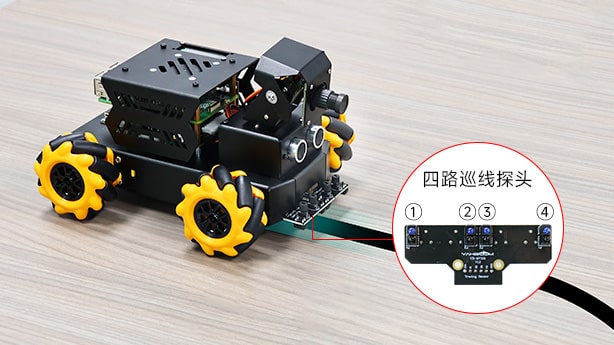
红外循迹传感器搭配4路高精度红外探头,旋钮式距离调节,可实现直角转弯、交叉路段等高难度循迹。
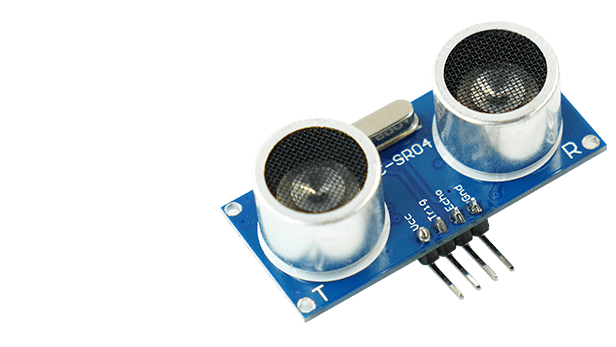
板载超声波传感器,支持实现超声波测距、避障、跟随等运动。
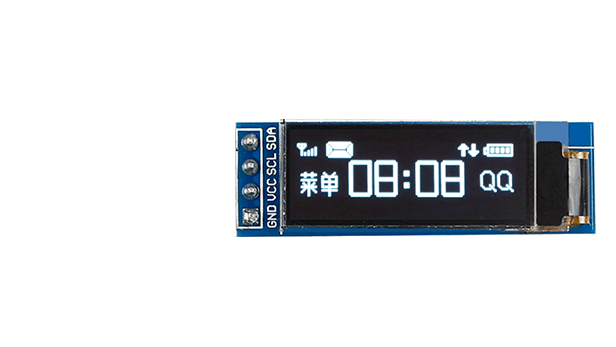
支持显示小车的内存、IP等状态信息,并能与传统传感器及AI视觉交互,将识别结果实时显示在OLED屏幕上。
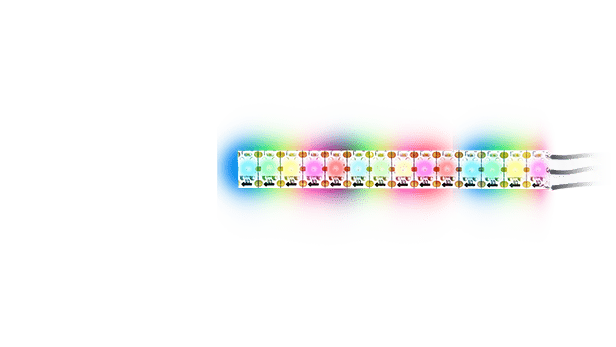
尾部配备了RGB高亮炫彩灯条,支持多种灯效控制,包括颜色变换、亮度调节、跑马灯、渐变灯、流水灯以及呼吸灯等灯效。
配备2000mAh容量7.4V 2S锂电池组,整车续航时长约2.1小时,锂电池设计有专属保护仓,避免底盘磕碰撞击电池。
小车能够准确识别车牌号码,并实时将识别结果呈现在 OLED 显示屏上。
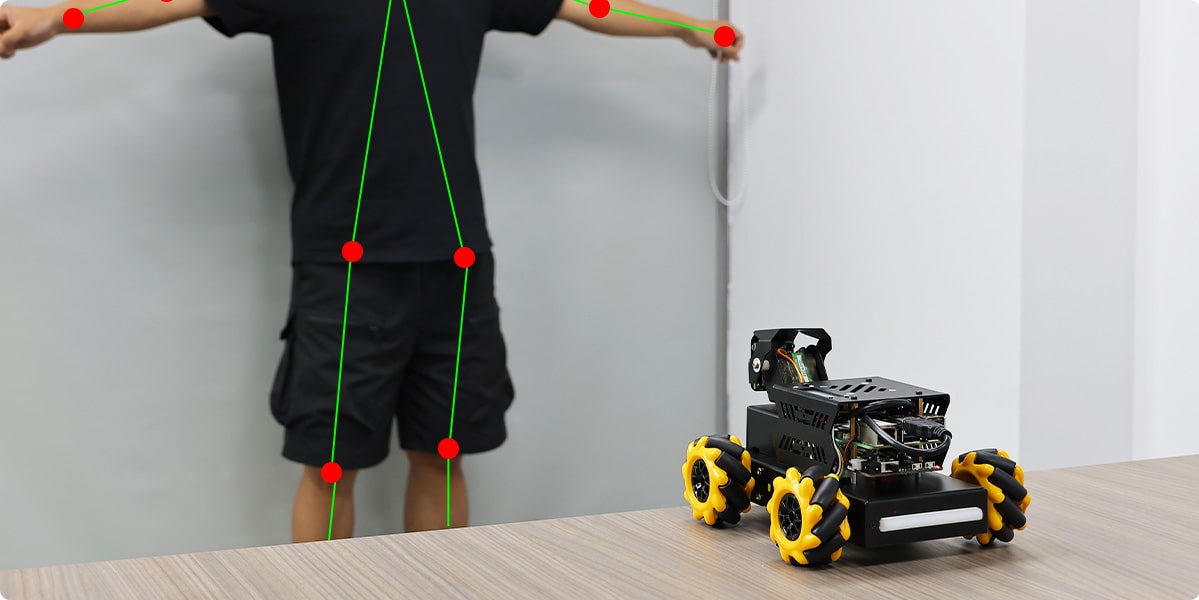
通过 MediaPipe 机器学习框架,可以精准地标记出人体的 33 个关键点坐标。
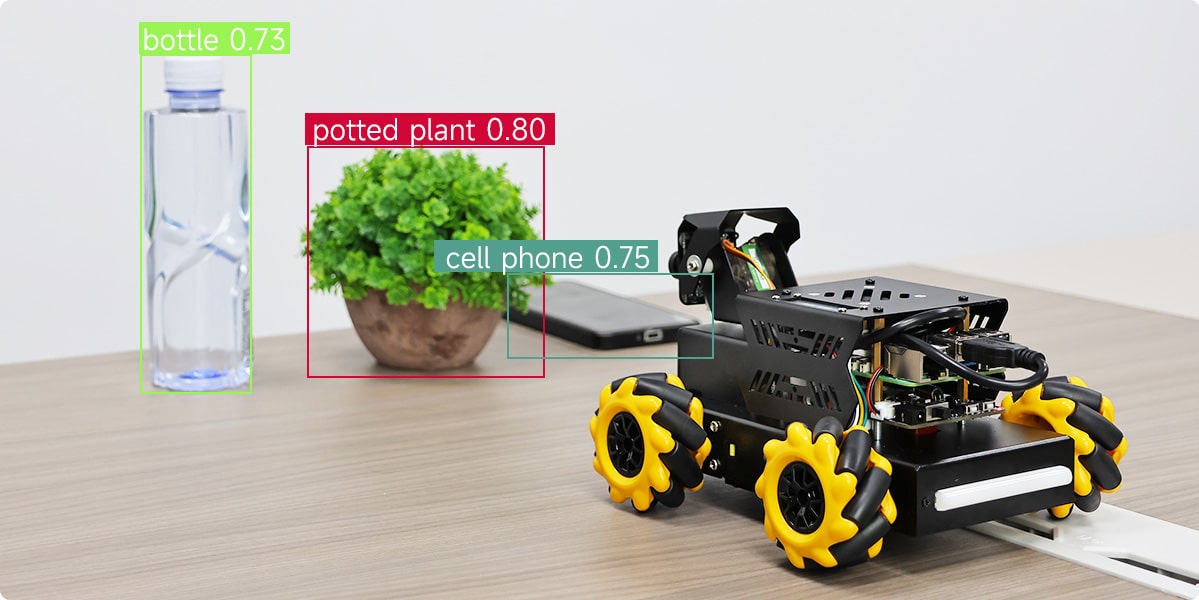
集成轻量级 YOLOv5-Lite 模型,能够快速准确地识别周围环境中的物体。
支持识别积木块上的垃圾类型,并实时将识别结果呈现在 OLED 显示屏上。
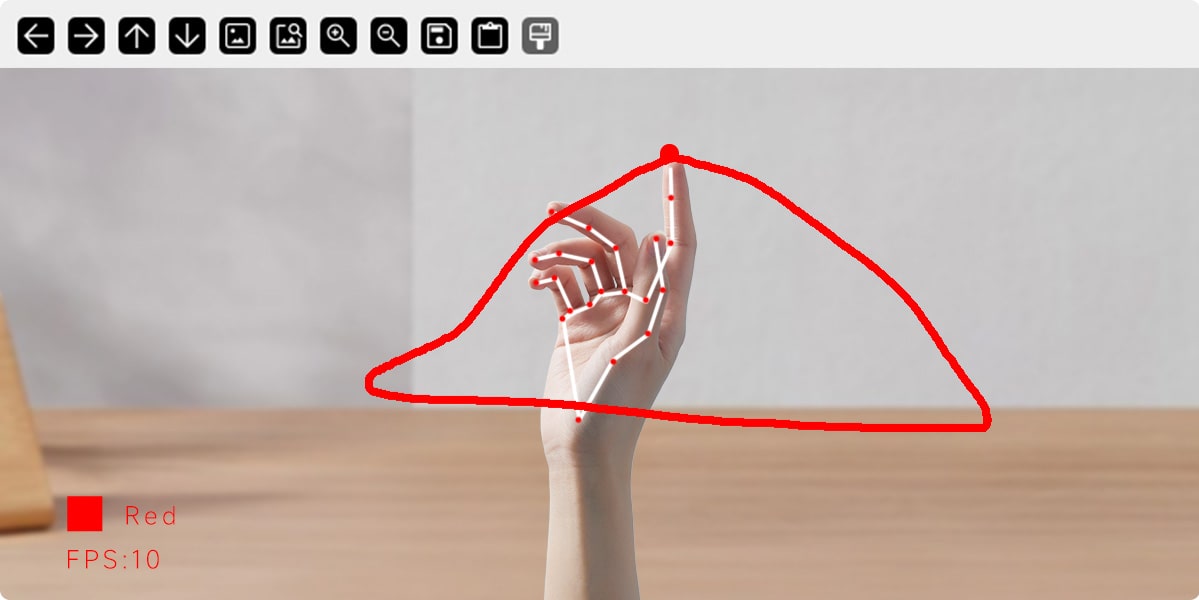
通过识别手指关键点坐标来检测指尖位置,进而实现在摄像头画面中绘制线条。
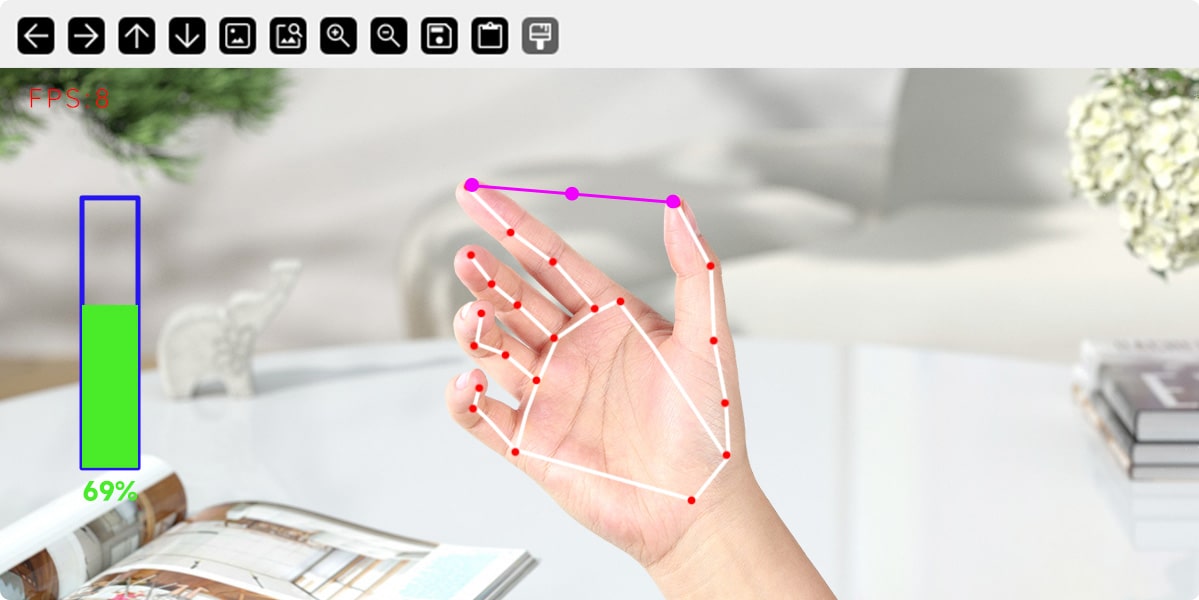
通过识别手指关键点坐标来检测拇指与食指的距离(张/合),实现控制图像的效果。
使用OpenCV实现颜色识别,当检测到目标颜色时,系统能通过控制舵机云台上下左右运动追踪颜色,也支持驱动车身前后左右运动跟随颜色。
采用OpenCV进行人脸识别,一旦捕捉到人脸,系统能通过控制舵机云台上下左右运动追踪人脸,也支持驱动车身前后左右运动跟随人脸。
支持识别14类手势动作,通过手势可控制小车前后左右运动。
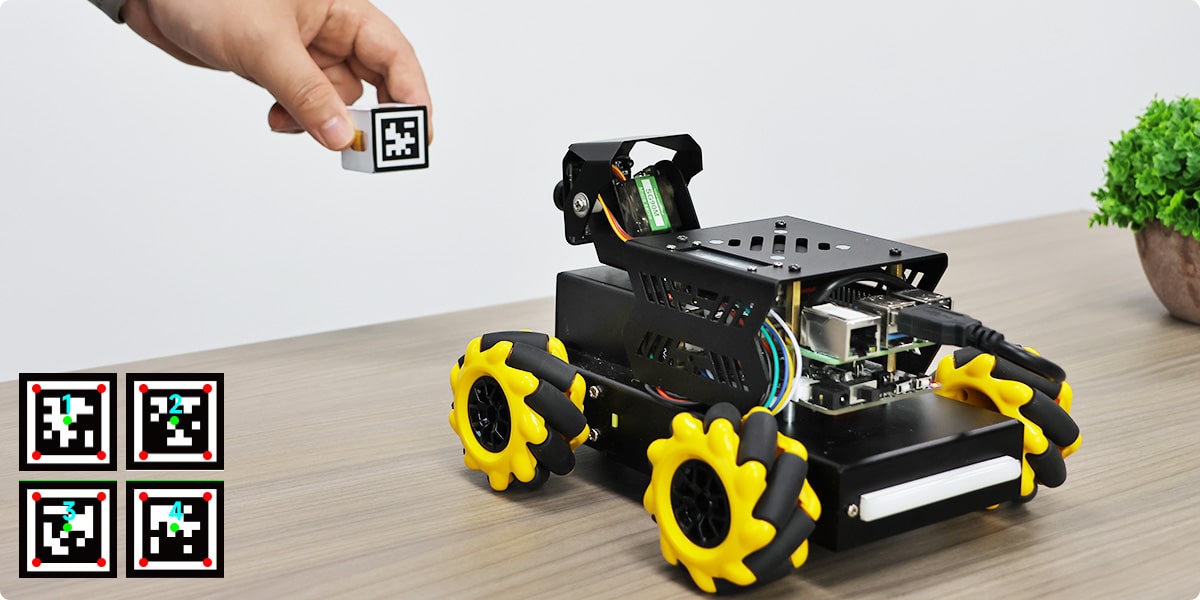
识别并读取二维码信息,RASPBOT-V2将根据获取信息执行相应运动。
支持识别AprilTag标签码,实现对标签码的云台跟踪以及小车跟随。
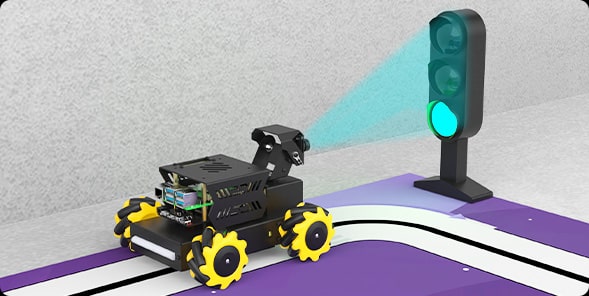
通过OpenCV提取ROI区域,通过模糊处理消除噪点,在二值化图像中找出线条的位置,利用PID算法对机器人进行方向的校准,实现AI视觉巡线。
通过巡线传感器上的4个红外探头,进行路线探测,巡线行驶。
支持安卓/IOS手机APP控制
点击查看
方便机器人控制、建图、采集数据、训练等操作。
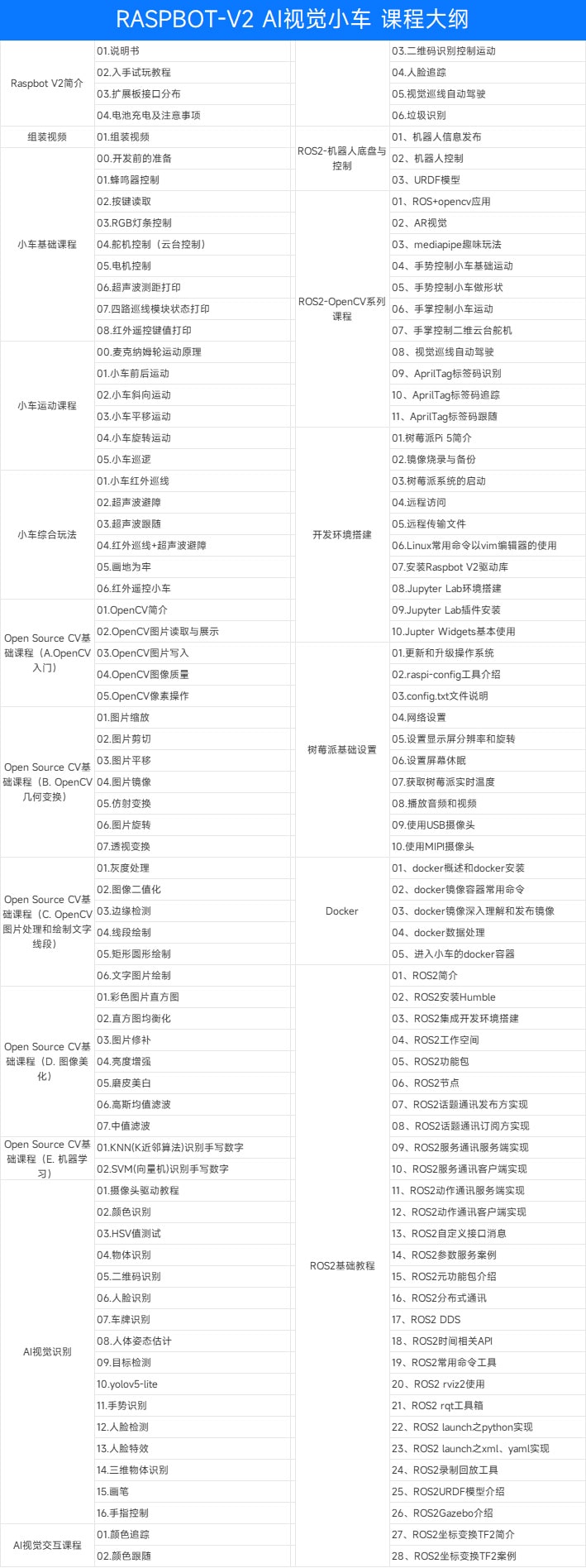
亚博智能配备精心研发的配套课程资料,提供基础理论知识与实操案例教程,内容由浅入深,方便用户快速上手学习。
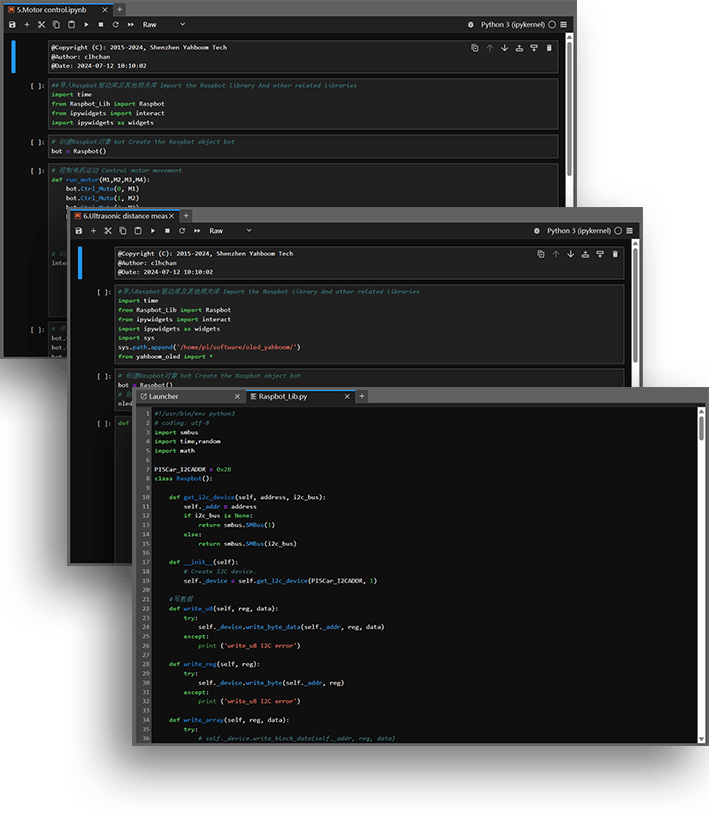
程序代码开源,让技术更自由,让创新更简单。