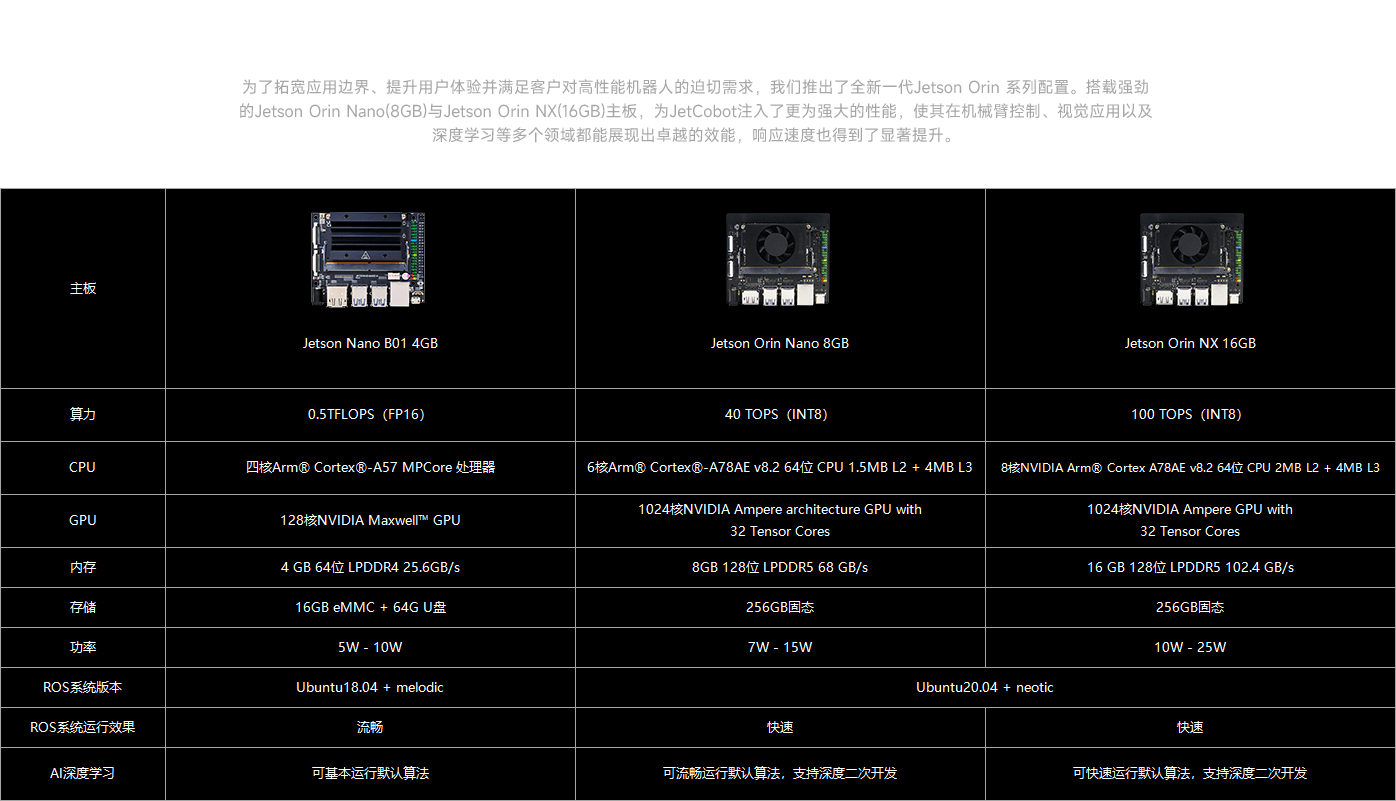
JetCobot AI协作机械臂
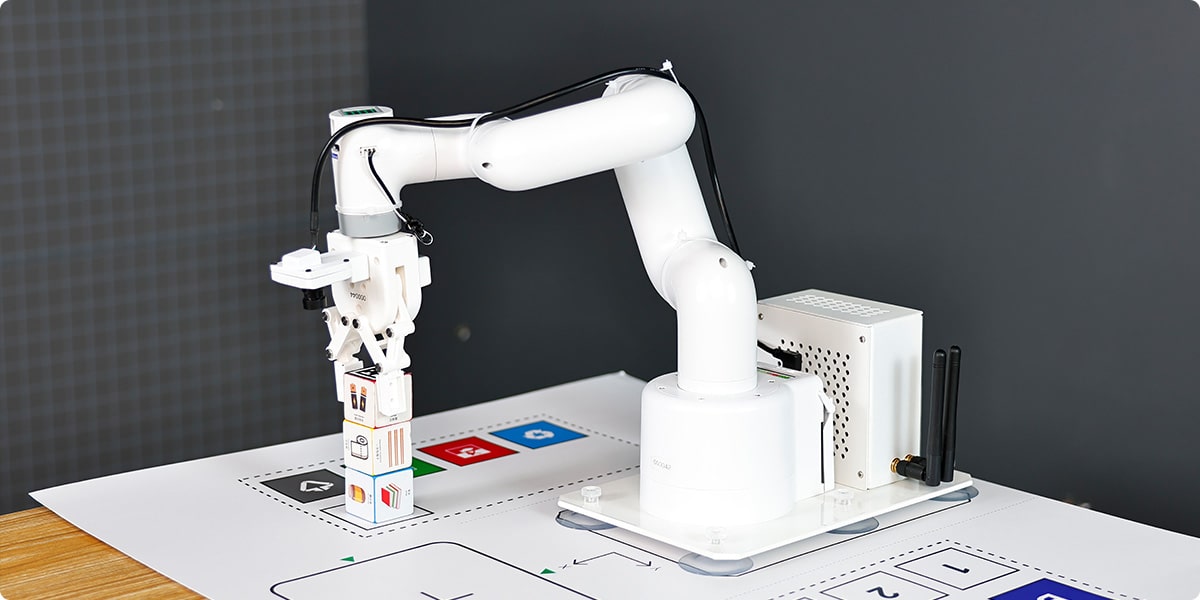
myCobot 280系列机械臂是大象机器人出品的桌面六轴多功能机械臂。其自重800g,有效载荷250g,臂长350mm,有效臂展280mm;满足科研教育、创科应用、商业展示等场景开发的六轴自由度协作机器人。
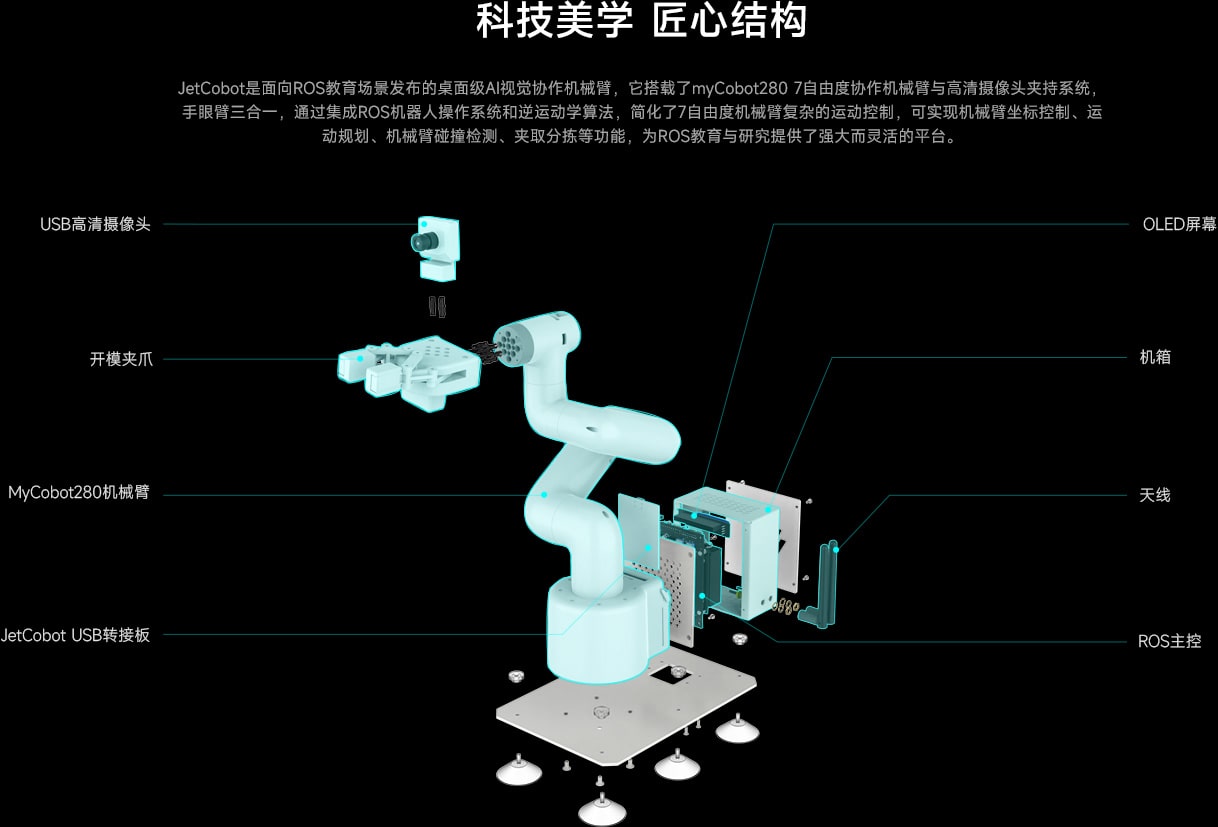
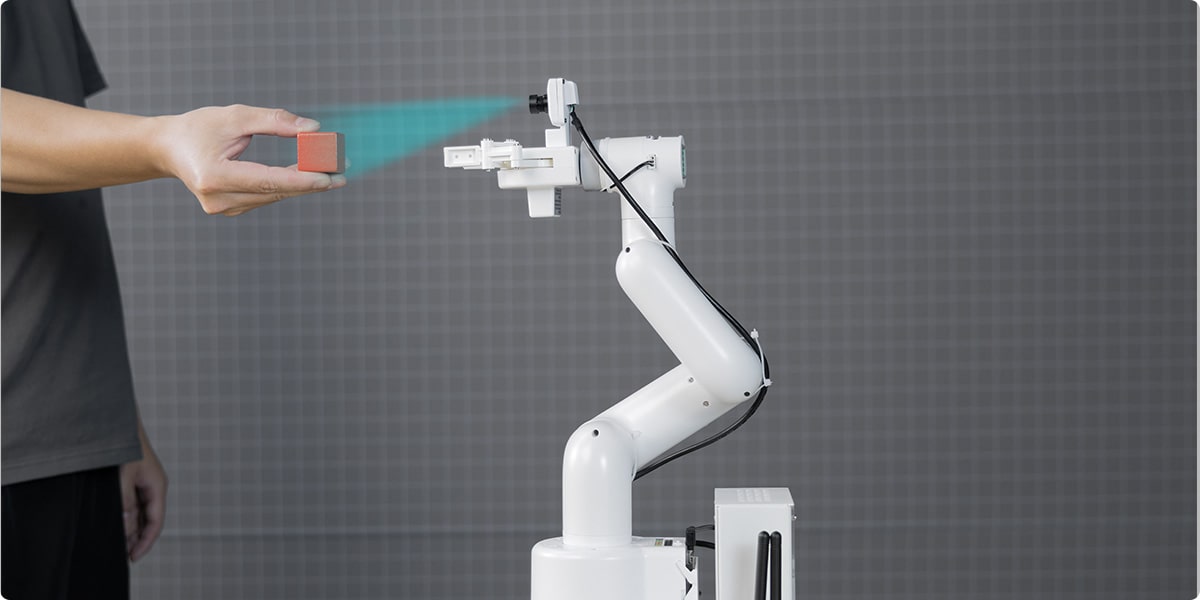
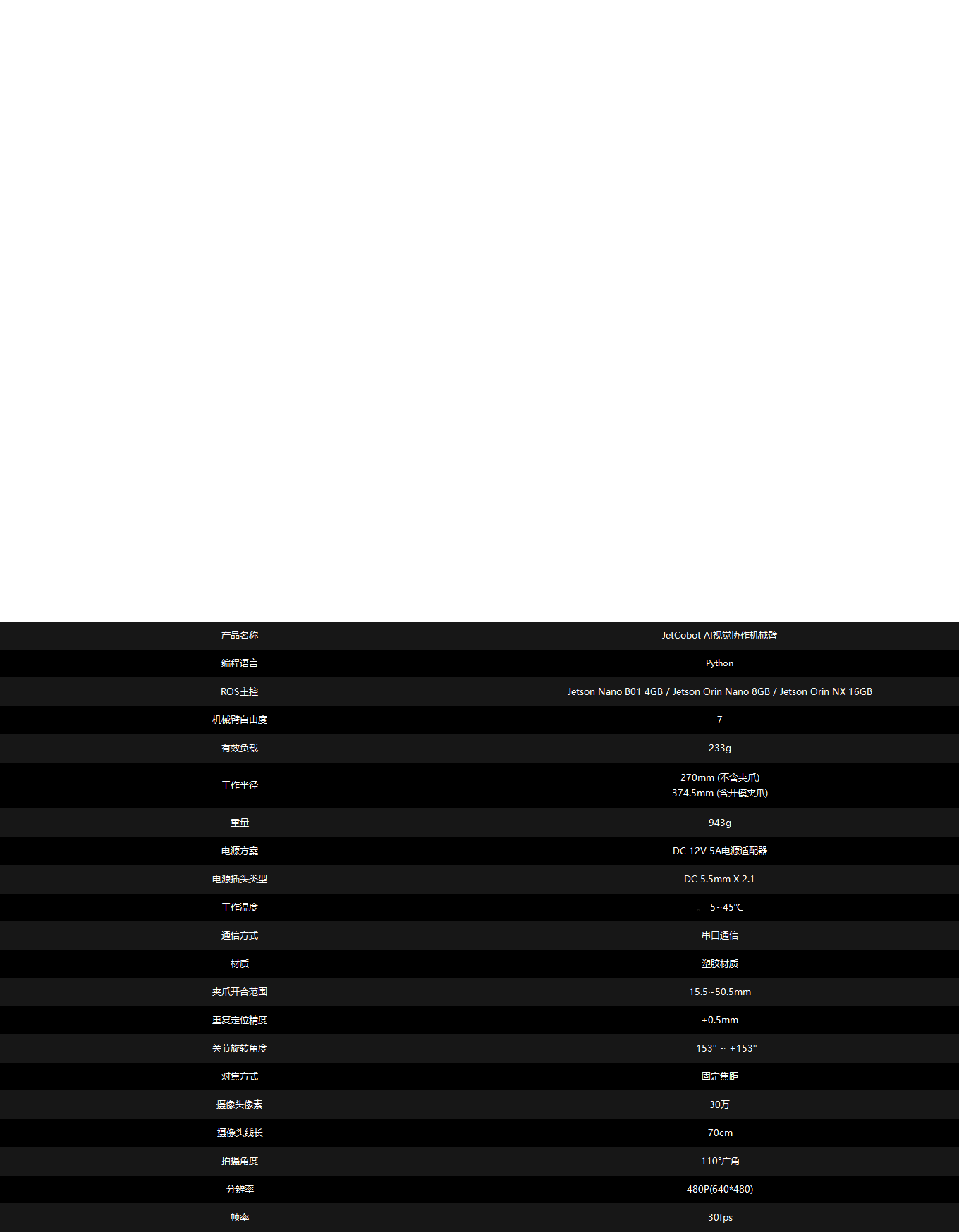
机械臂搭载的USB摄像头拥有30万像素、110度视场角、480p分辨率30fps帧率,可以提供高质量的图像采集。
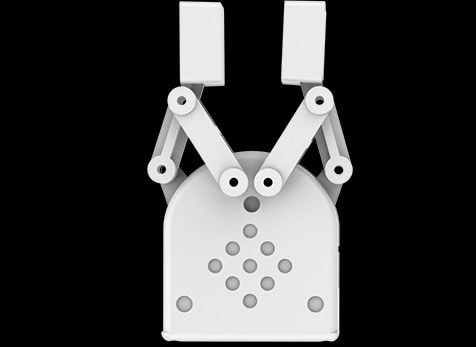
夹爪由电机驱动,加减速可控,对夹取物品的冲击可以减至最小,定位点位可控,夹持可控,拥有抓取物体牢固、不易掉落、易操作的优点。
标配0.91寸OLED屏幕,可实时显示JetCobot运行状态实时信息,方便用户开发扩展。
JetCobot机箱采用金属镂空设计,可有效保护主控板,散热性能优秀。
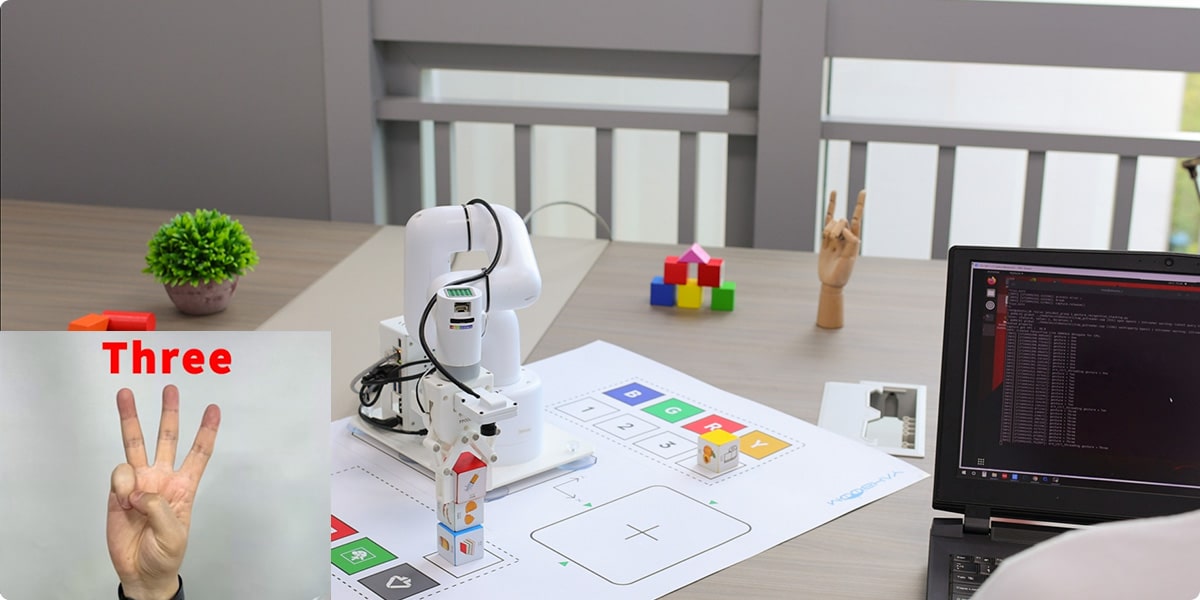
除了标准颜色外,还可提取自定义颜色进行机械臂颜色识别追踪,实现眼随手动。
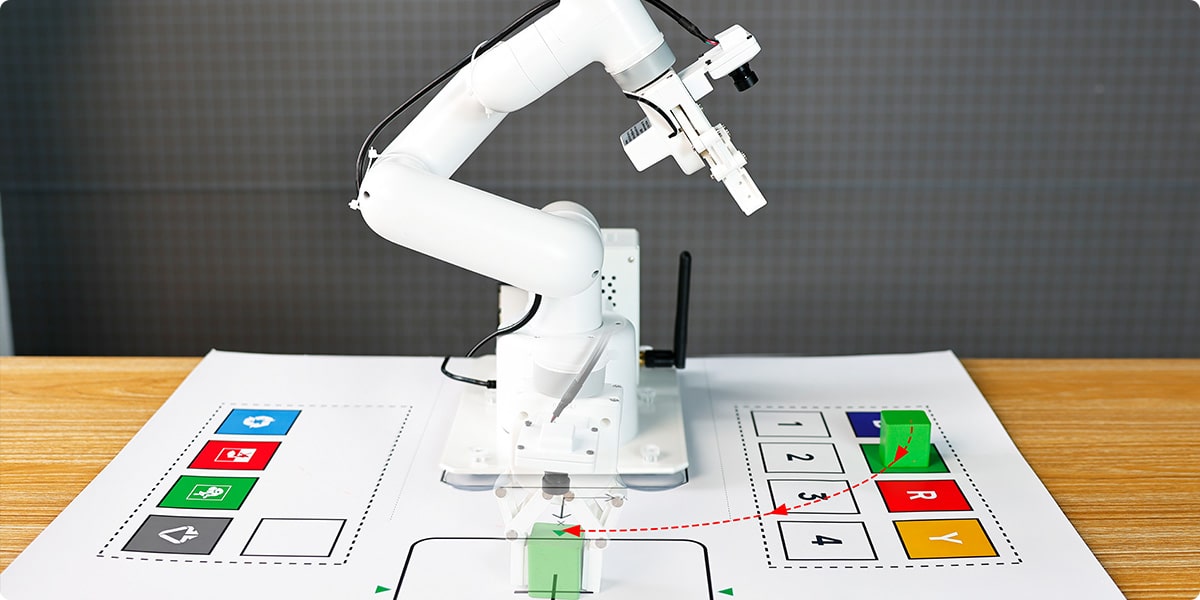
将木块放置到地图识别区域内,机械臂会自动分辨当前的颜色并将木块夹到地图对应颜色区域。
将木块放到摄像头前,机械臂识别到木块颜色后将对应颜色区域的木块夹到中间区域。
选择机器人喜好颜色,它将会前后跟随目标颜色,你进我退,你退我进。
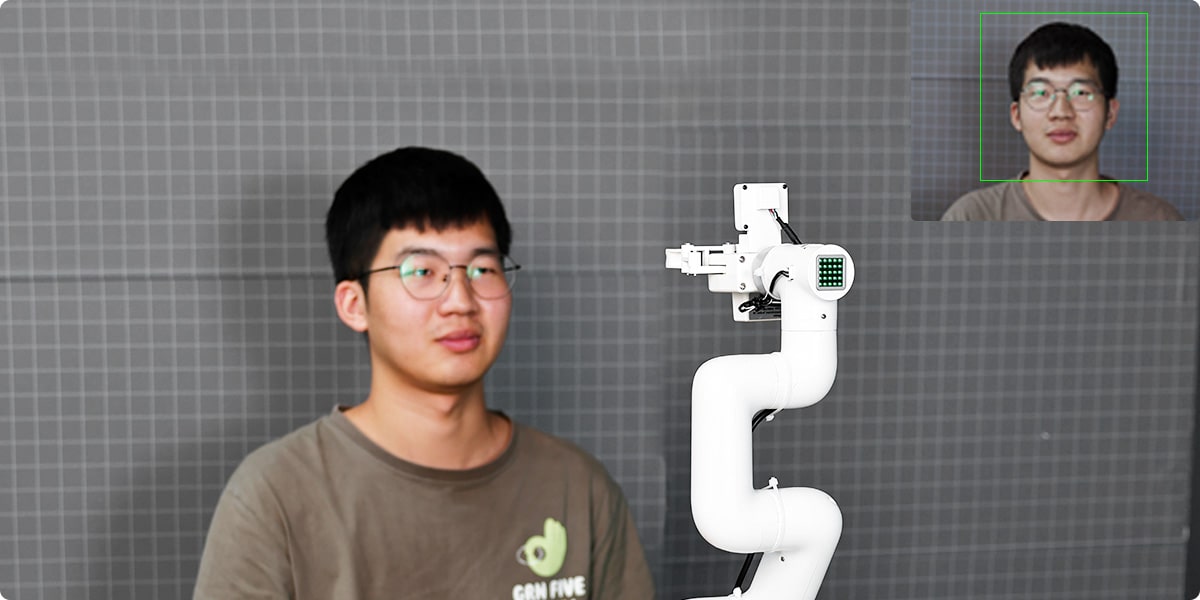
检测当前画面是否有人脸,识别到人脸后进行标记并跟随移动。
可以识别不同的AprilTag标签码,并判断出标签码方块的位置,实现智能码垛堆叠。
JetCobot的套件内配备了垃圾图案物块,通过加载相应模型,JetCobot可以快速识别不同的“垃圾”,并放置到相应的分类区域。
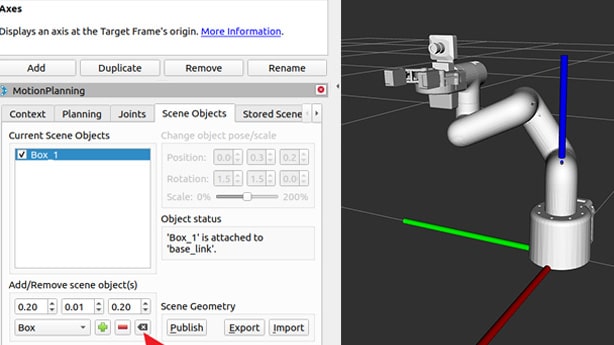
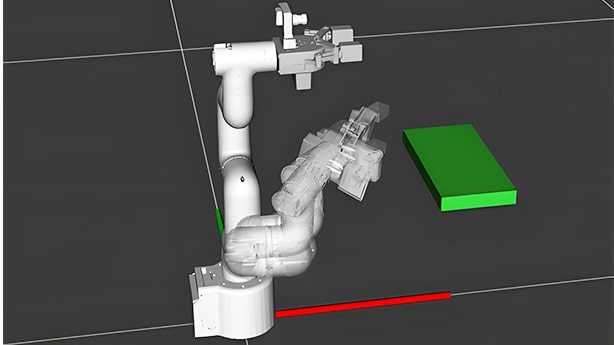
实物等比例全还原模型仿真,MoveIt工具可视化操控。支持拖拽、预设位置控制、机械臂运动避障等功能。
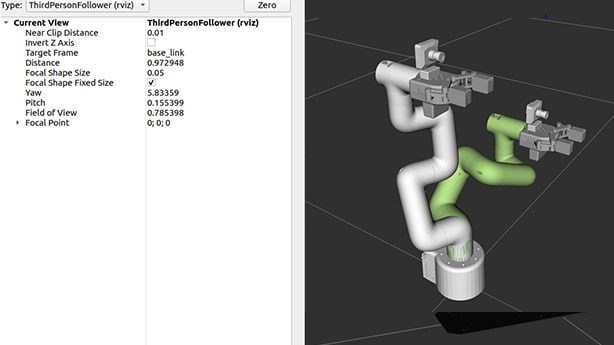
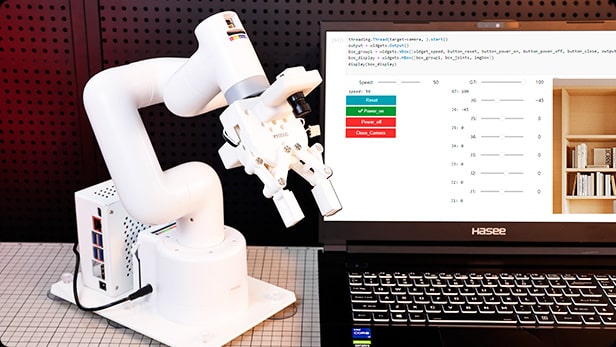
在仿真界面控制机械臂动作的同时,真实机械臂可做出对应的动作。
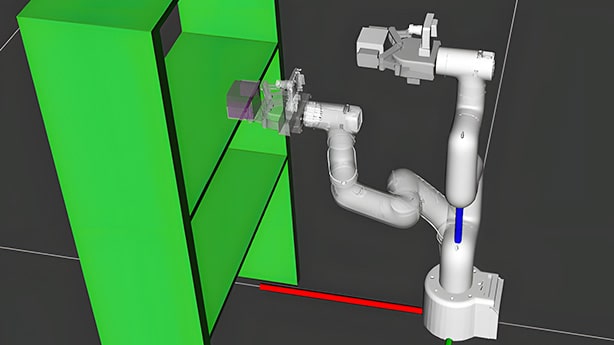
在仿真界面创建障碍物,驱动机械臂完成随机运动,机械臂会在运动的同时做出躲避障碍物的动作。
导入设置规划好的场景,驱动机械臂在场景中完成物块夹取、放置的动作,并对场景进行碰撞检测。
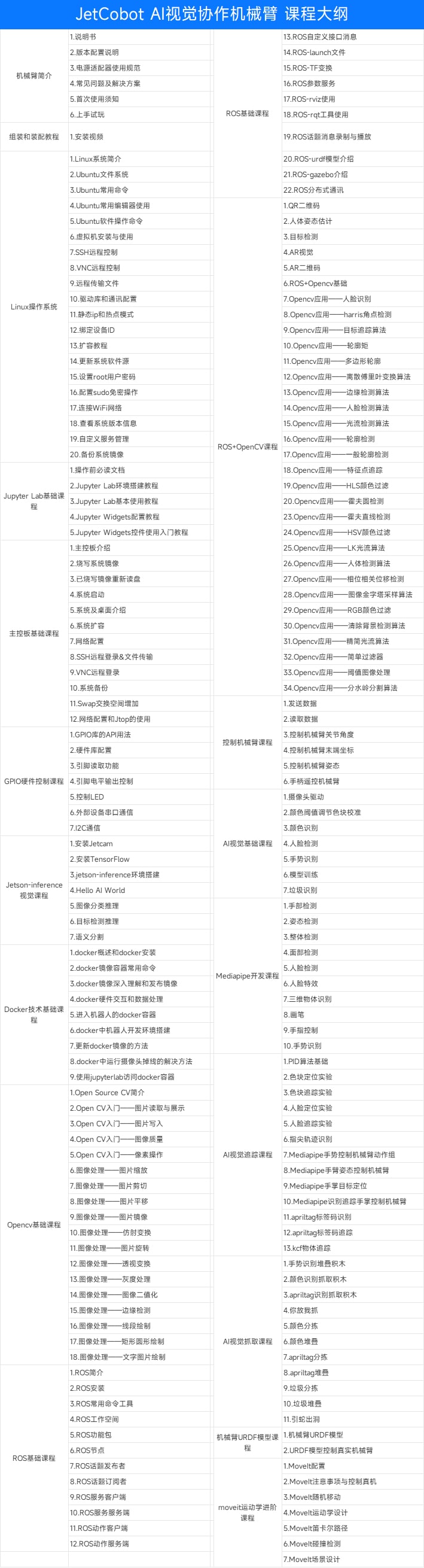
亚博智能配备精心研发的配套课程资料,提供基础理论知识与实操案例教程,内容由浅入深,方便用户快速上手学习。
程序代码开源,让技术更自由,让创新更简单。