Muto S1/S2六足机器人
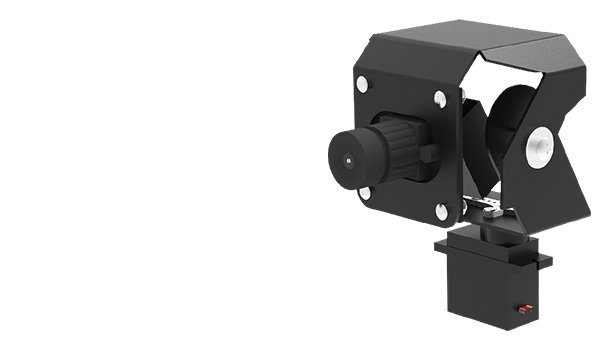
Muto六足机器人搭载1080P高清高帧率摄像头,相比普通摄像头,视频画面更清晰,视场角更大,视觉识别范围更大。同时搭配精巧版二自由度云台,可以在水平或垂直方向上做二自由度运动,提供灵活的视角控制。
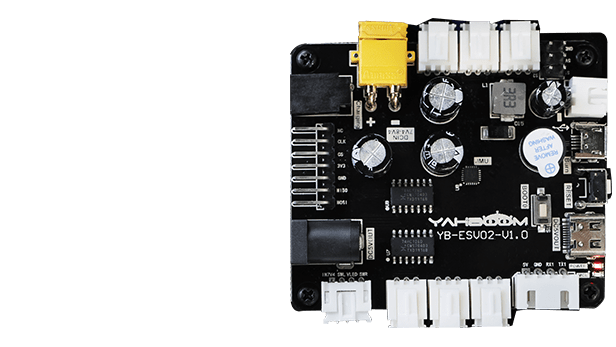
转为仿生六足机器人设计,板载内置IMU传感器,可以实时检测机器人的机身姿态。拥有多种六足机器人扩展接口,方便用户快速扩展。
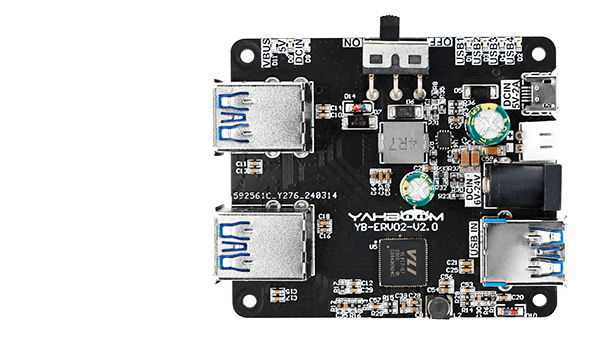
USB3.0 HUB扩展板旨在解决主板USB接口不足、USB外设增加导致供电不足等问题,它通过使用USB3.0通信的接口和HUB芯片扩展4个USB接口,保障接口高速数据传输;支持ROS机器人/小车、树莓派/Jetson系列主板,无需驱动,即插即用。
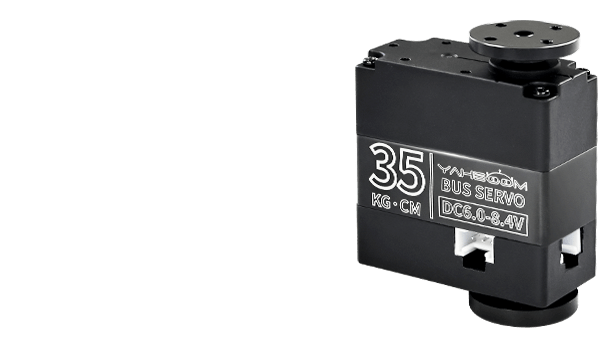
Muto六足机器人的模块化同服关节是由铁芯马达、金属减速齿轮、集成控制电路和铝合金外壳等组成的串口总线舵机,采用了大速比、高效率减速器、在保证大扭力输出的同时,可调节舵机运行速度,适应不同场景需求。
机器人标配7.4V 9900mAh大容量高功率动力电池组,为机器人提供源源不断的续航动力。
S2专业版拥有高帧率摄像头云台,系统采集摄像头画面进行分析,结合PID算法实时修改云台角度,从而追踪颜色。
S2专业版支持HAAR检测人脸功能,通过PID算法计算人脸在摄像头画面中的位置控制二自由度云台追踪人脸。
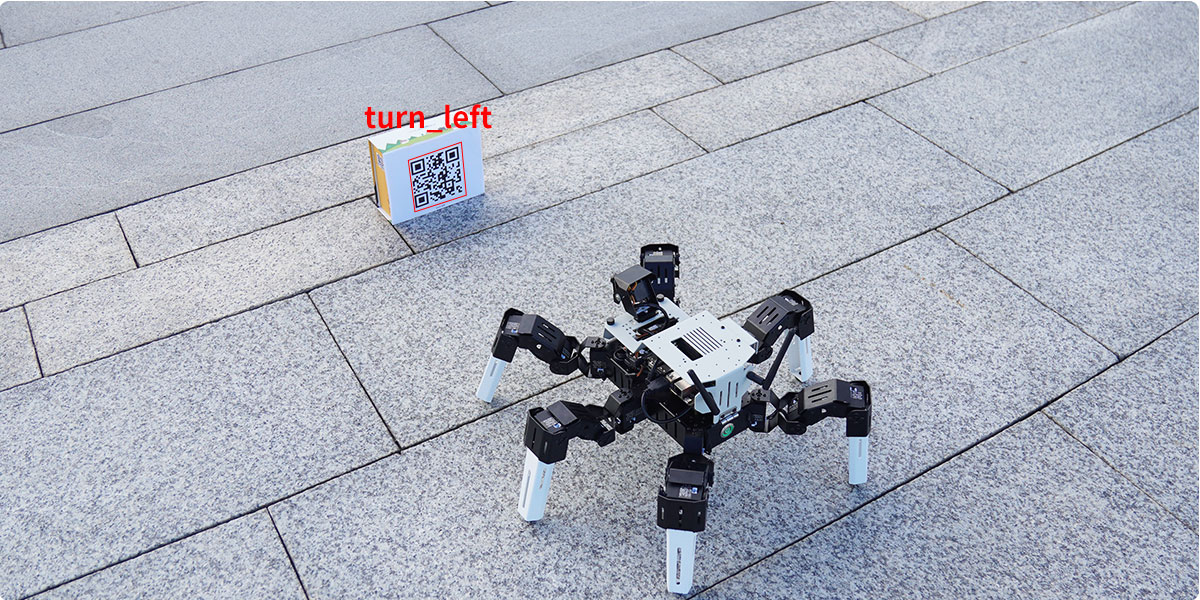
通过摄像头扫描二维码,并识别出二维码的内容,还可根据特定二维码内容执行不同动作。
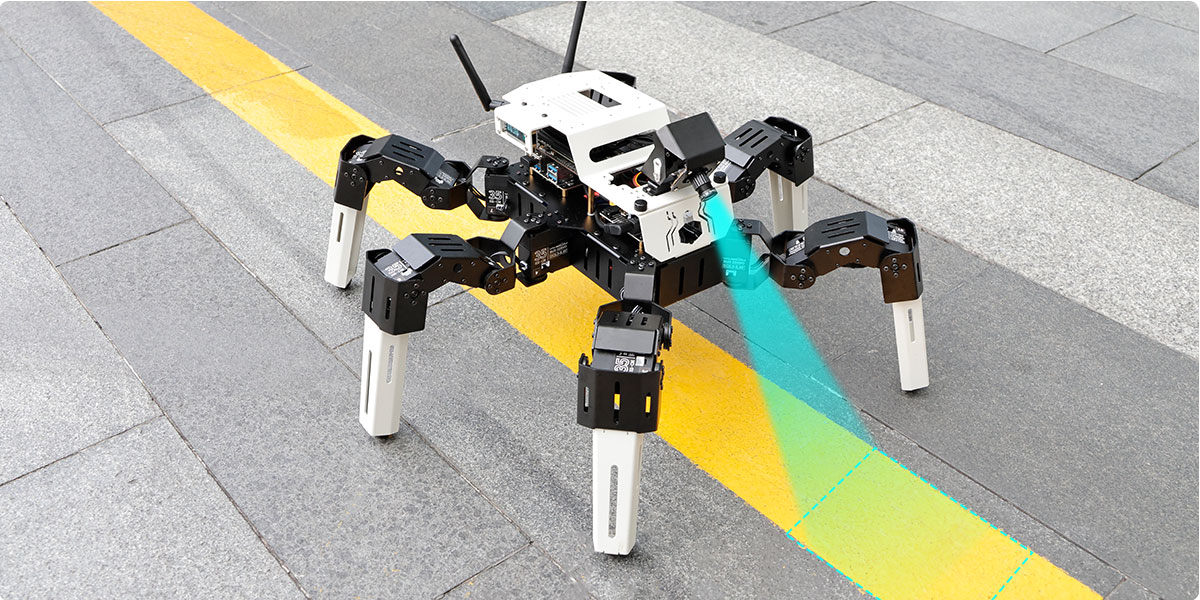
通过机器人视觉处理识别到选定的颜色,开启视觉巡线后,自主调节行走路径,实现视觉巡线。
使用深度学习框架实现高效的物体识别,使机器人能够迅速而准确地检测和识别环境中的物体,并根据识别的物体完成固定动作组。
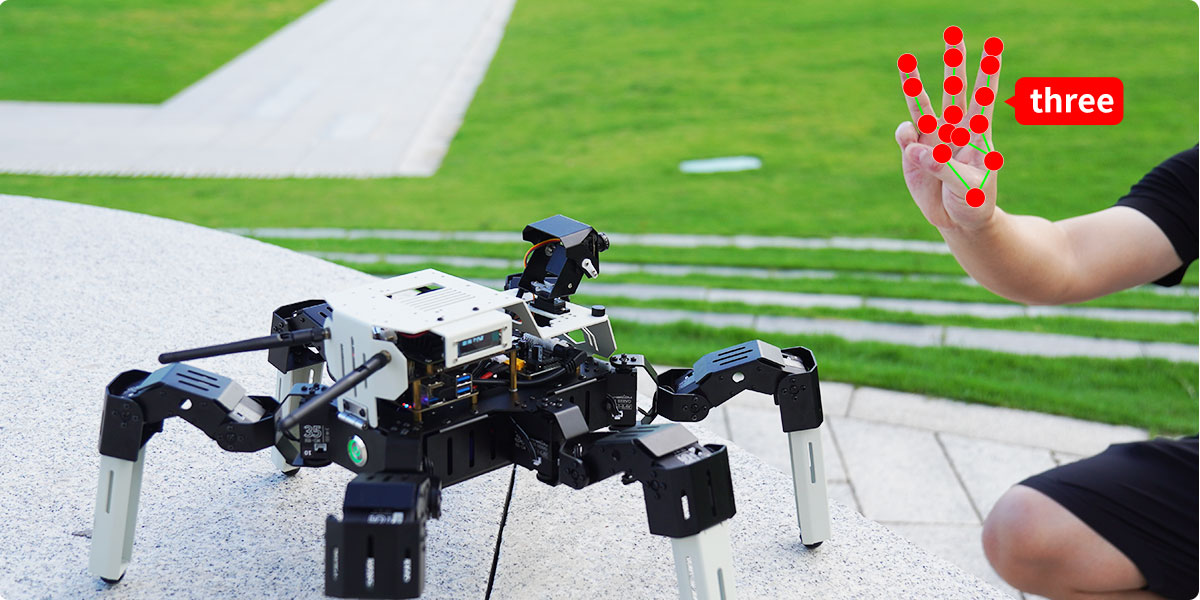
使用深度学习框架jetson-inference中的poseNett计算机视觉库,实现检测图像中的人体关节点,并以点和线的方式呈现这些关节点,并分析各关节点的坐标参数,用于精确控制机器人的运动。
通过检测手指关节点的位置信息,分析手指开合状态来识别1-8个不同的手势,每个手势对应着控制机器人执行八个预设动作。
MUTO S2专业版六足机器人支持手机APP遥控,可以通过手机APP控制机器人运动方向,支持表演模式、全屏控制、数据监测、机器人校准、动作表演等功能。
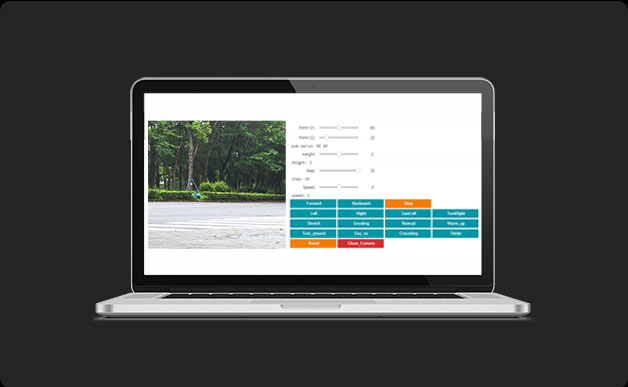
S2专业版六足机器人可通过JupyterLab网页生成上位机控件,控制六足机器人运动和各种表演动作。
MUTO S1基础版标配使用2.4G无线手柄控制六足机器人运动,MUTOS2专业版标配USB无线手柄控制六足机器人动作。
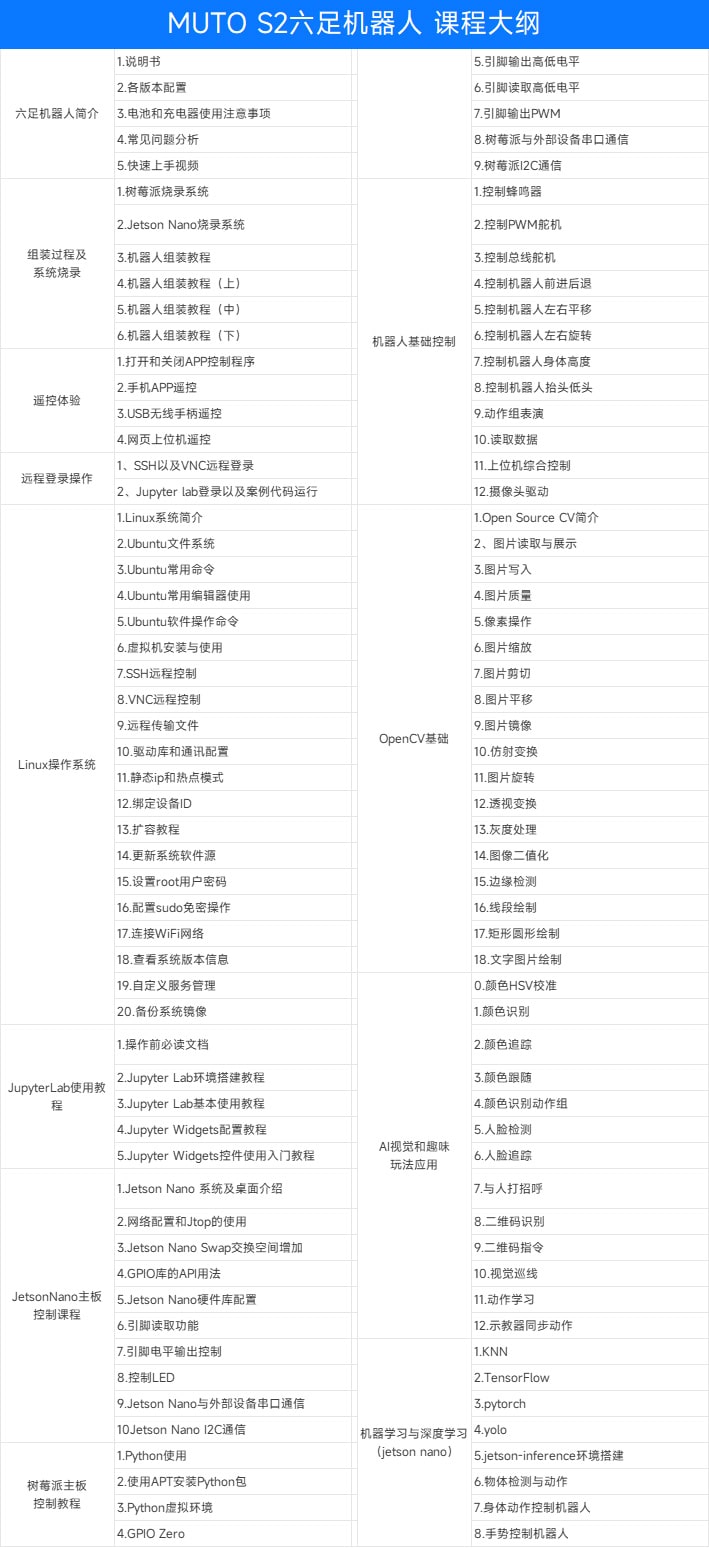
亚博智能配备精心研发的配套课程资料,提供基础理论知识与实操案例教程,内容由浅入深,方便用户快速上手学习。
程序代码开源,让技术更自由,让创新更简单。