DOGZILLA 四足机械狗
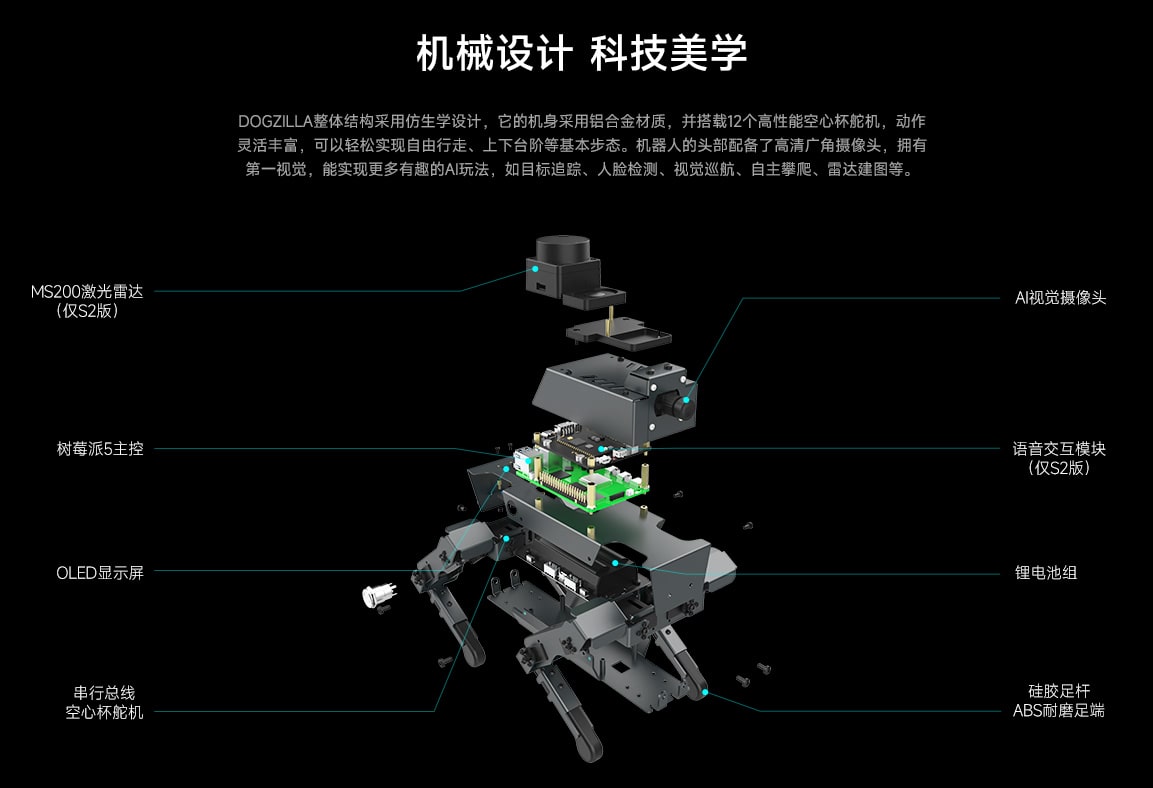
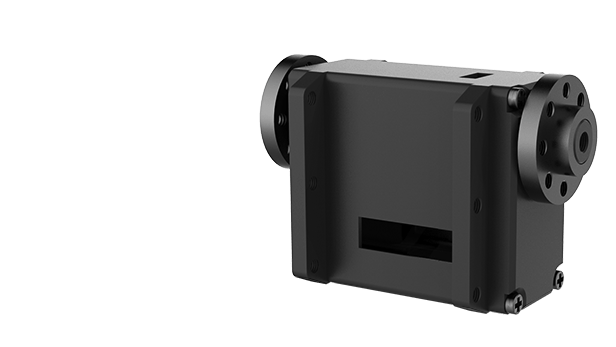
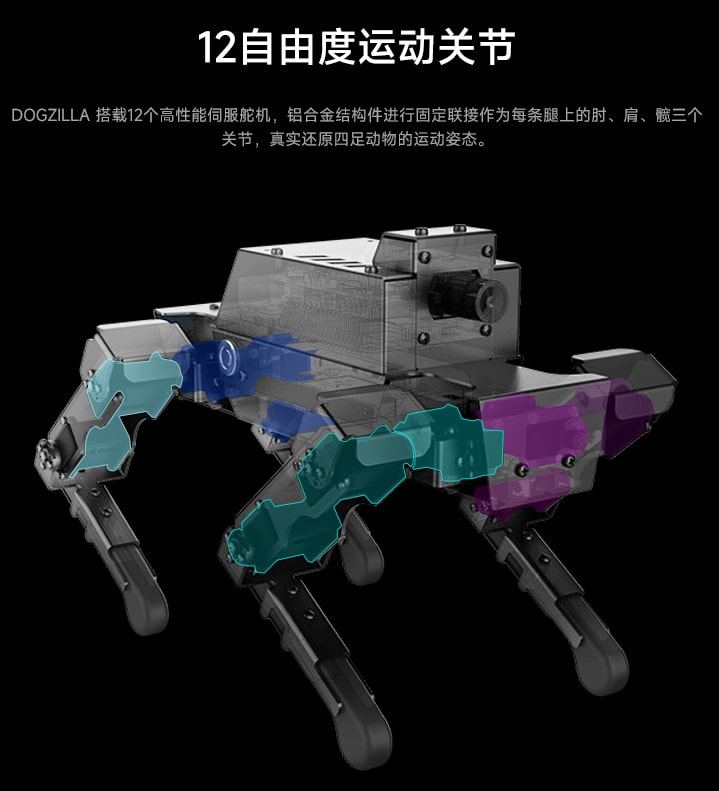
DOGZILLA的模块化同服关节由直流空心杯电机、减速齿轮组、滚珠轴承、12位磁编码器和集成控制电路组成,采用了大速比、高效率的减速器,在保证了柔顺性的同时,提高了负载自重比。
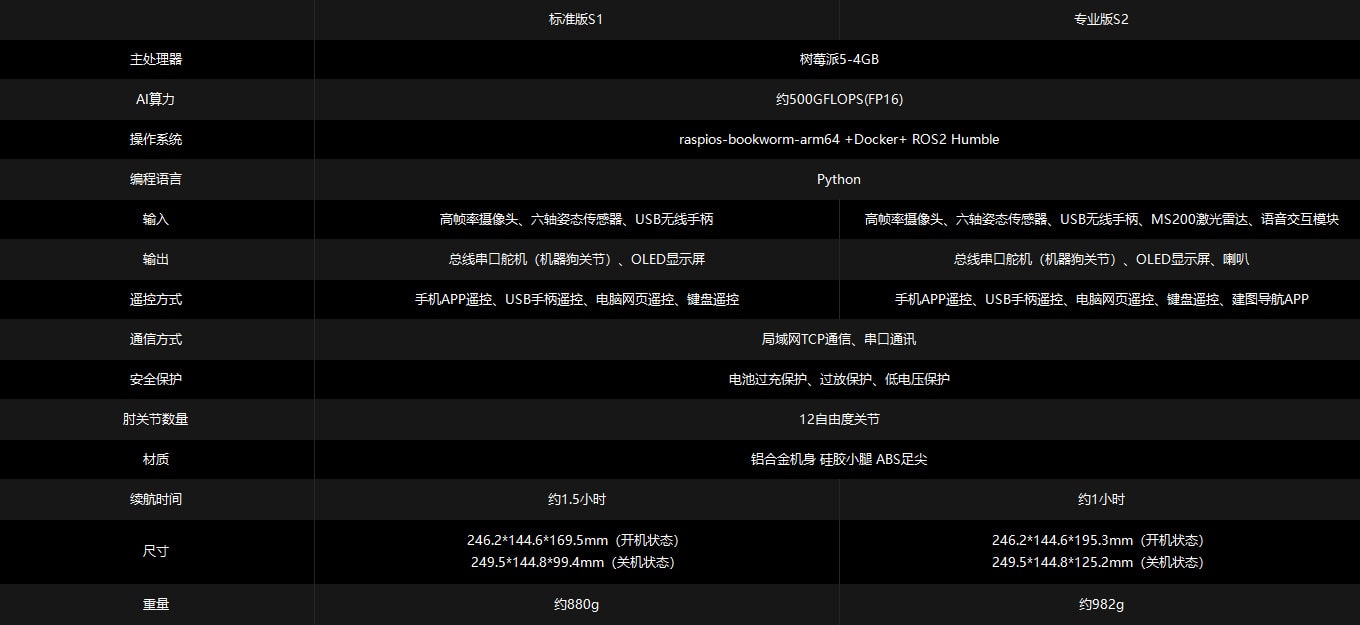
专业版S2搭载了高性能TOF激光雷达,通过全方位激光扫描可实时构建地图,精准感知周围障碍物,实现动态避障、警卫、巡逻、跟随等功能。
内置科大讯飞定制语音识别算法和发音人声,可让四足机器狗具有“能听能答”的特点,支持语音指令控制DOGZILLA移动和玩法互动。
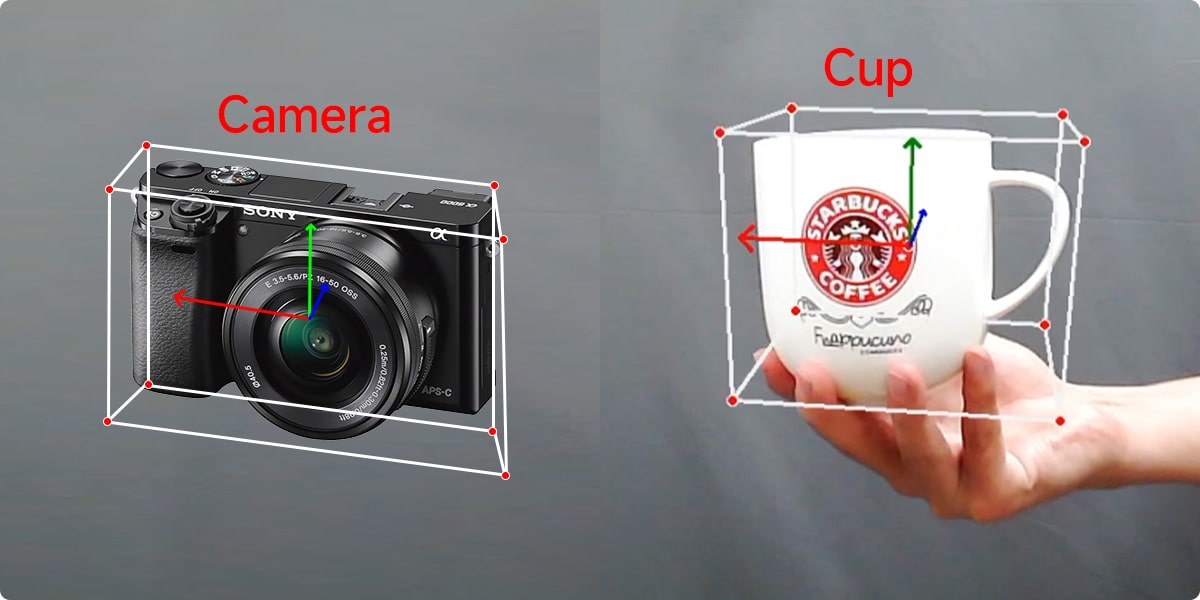
摄像头支持120PFS帧率,120°广视角,拥有2MP像素,呈像画面清晰,适合做AI视觉识别、自动驾驶项目。
通过IMU获得的姿态数据,采用闭环控制的方式无论平面如何晃动,DOGZILA 的机身都能保持水平稳定。
运动过程中受外力干扰导致航向角变动时,内部算法自动补偿足端速度保持初始航向角运动。
通过MediaPipe完成手部检测、姿态检测、整体检测、面部检测、三维检测识别等功能。
可通过摄像头扫描二维码并识别出二维码中的内容。也可通过摄像头来跟随二维码前进与后退。
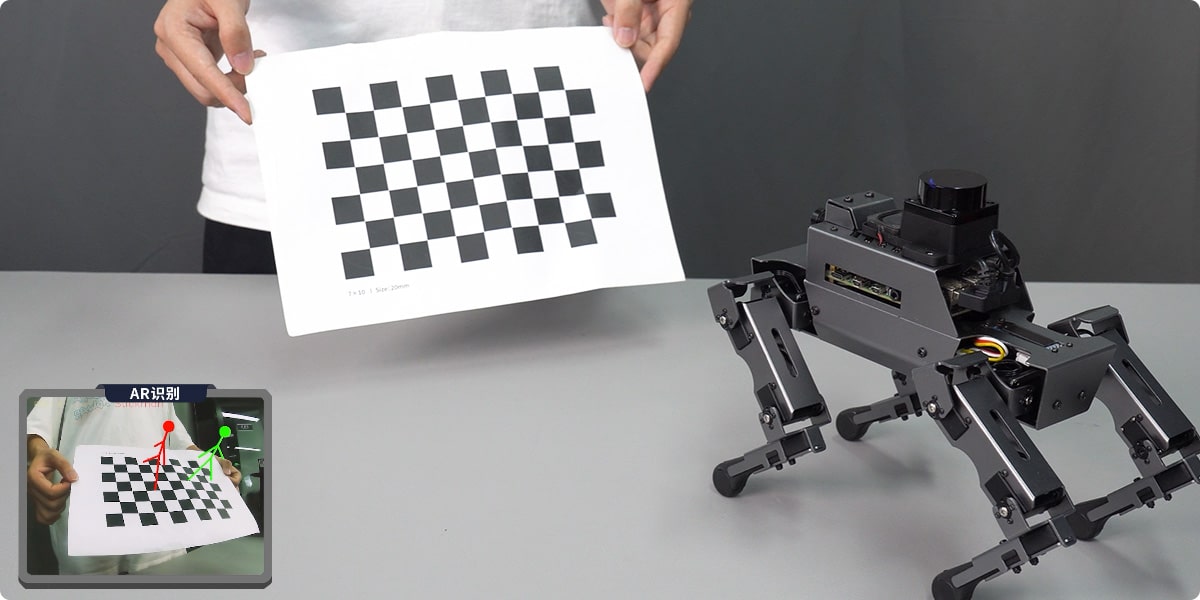
通过配合棋盘格纸,AR显示增强图像可实时呈现画面棋盘格纸上。
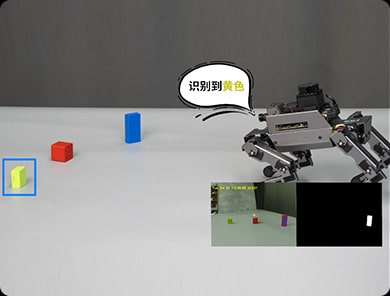
可捕捉摄像头画面中的物体颜色,通过计算机识别并判断,将物体轮廓呈现出来,机身实时调节身体姿态来追踪目标位置。
当DOGZILLA检测到人脸时,它还能像宠物一样做出握手或者撒娇的动作。
通过摄像头画面识别障碍物,自主调节身体姿态和运动步态,实现攀爬越障。
DOGZILLA利用二维码识别技术,根据识别指令执行各种动作。
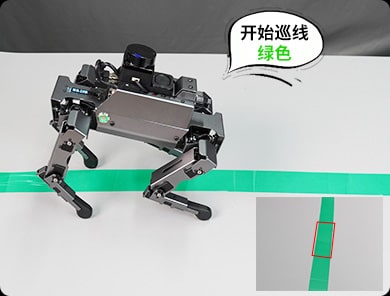
通过OpenCV可以识别到选定的颜色后,自主调整行走步态,实现视觉巡线。
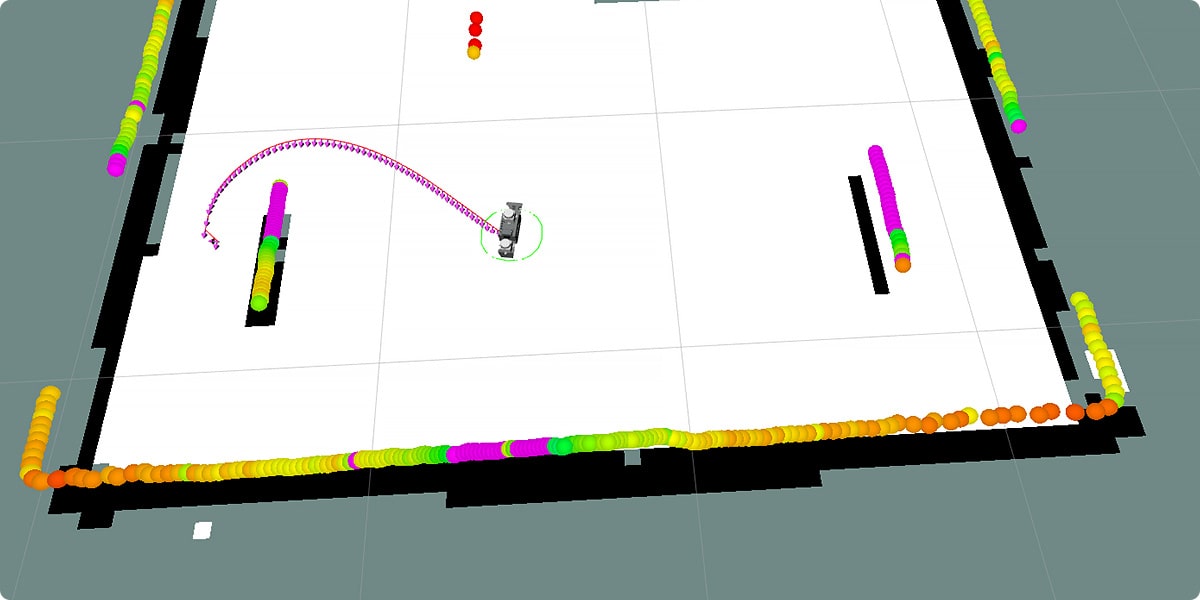
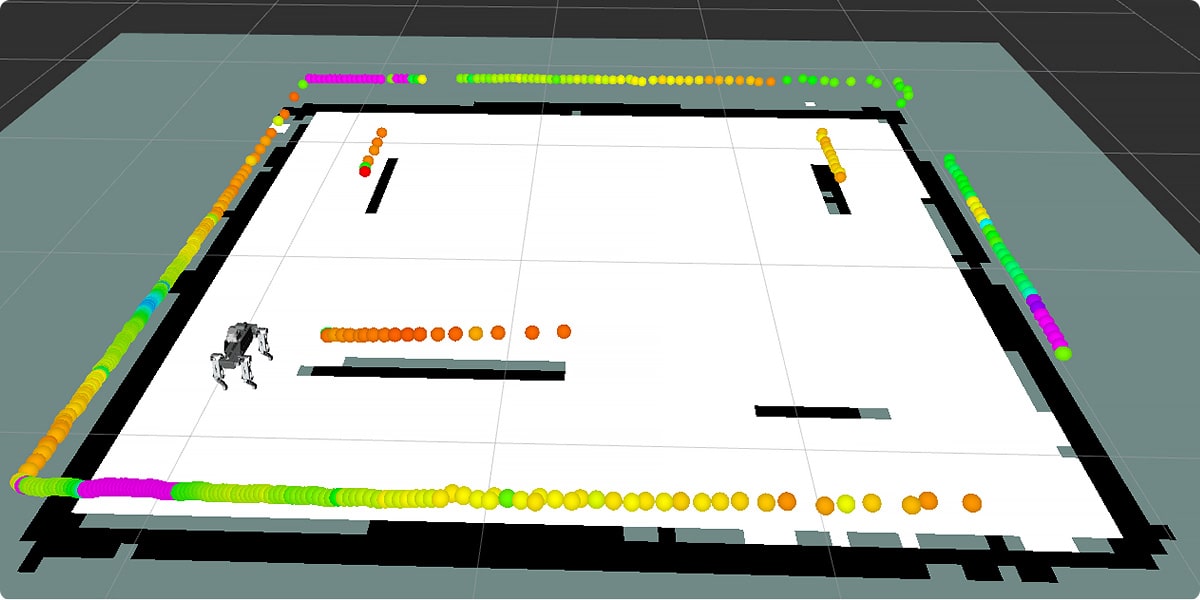
DOGZIILA可以通过激光雷达,imu等传感器,利用cartographer进行定位,实现导航与避障。
DOGZIILA可以通过激光雷达,imu等传感器,利用cartographer算法进行建图。
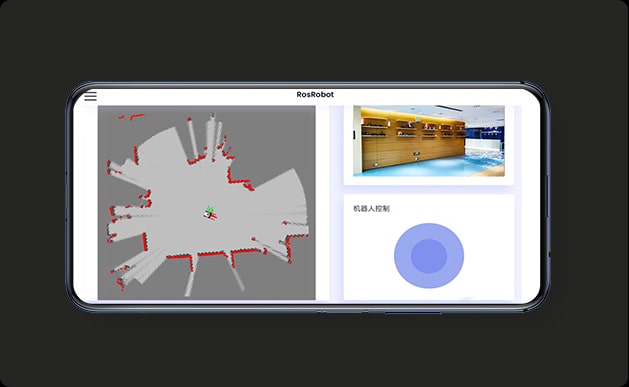
通过手机控制机器狗实现SLAM建图导航和摄像头画面传输。
机器狗将在固定轨迹巡逻,当巡逻路线有障碍物时,机器狗将停止巡逻并预警。
通过TOF雷达扫描前方移动目标,机器狗将实时跟随前方目标。
通过TOF雷达扫描周围警戒区域,当有物体接近时,机器狗将转向锁定可疑物并预警。
通过TOF雷达扫描周围环境,机器狗将在前进过程中避开前方障碍物。
APP集成控制功能,实景人称视角控制机器狗全向移动,多姿态运动等,同时也支持单独控制某个关节舵机,或者某一条腿,从而改变机身姿态。
立即下载
专业版S2机器狗建图或者导航模式启动之后,可以连接手机进行操控,并可以在手机APP上查看当前建图的情况,也可以通过APP下发导航点,让机器狗到指定位置。
USB无线手柄拥有双摇杆和多个按键,可灵活控制DOGZILLA,搭配手机APP实现大屏遥控功能。
通过浏览器就可以直接访问并控制DOGZILLA,方便又实用。
可以使用键盘控制机器狗,体验不同的遥控乐趣。
亚博智能配备精心研发的配套课程资料,提供基础理论知识与实操案例教程,内容由浅入深,方便用户快速上手学习。
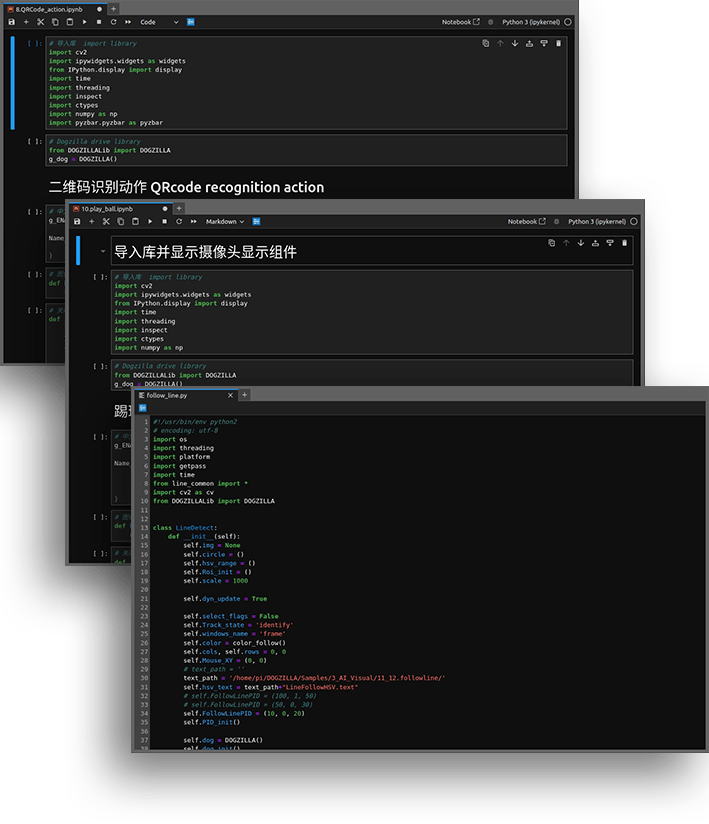
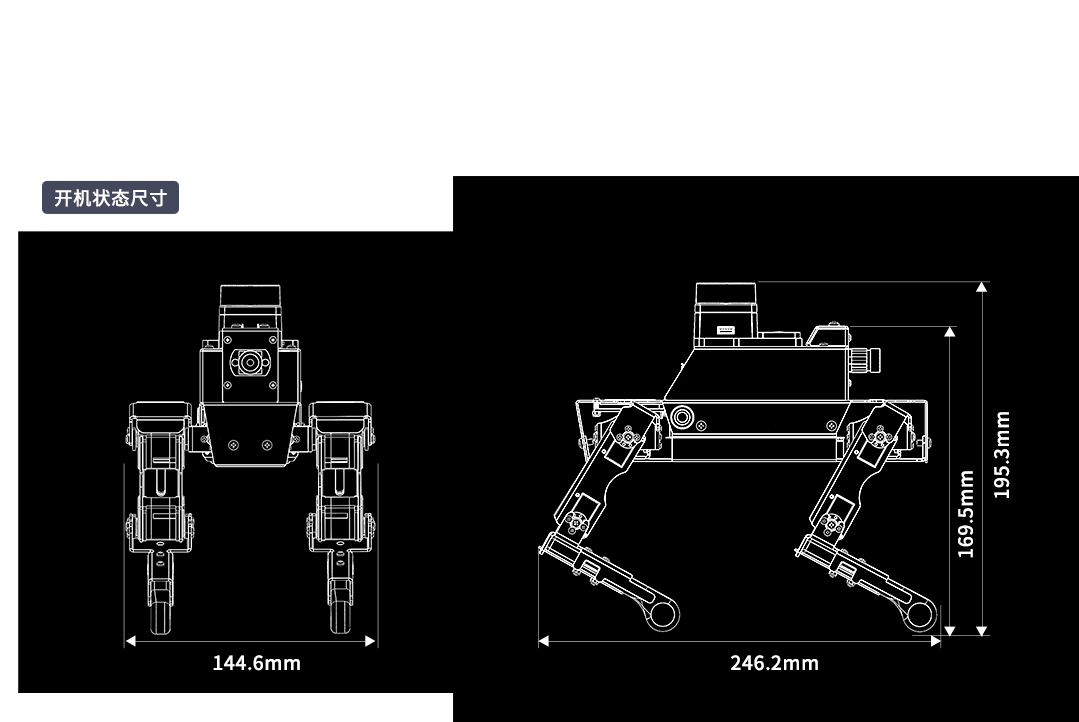
程序代码开源,让技术更自由,让创新更简单。