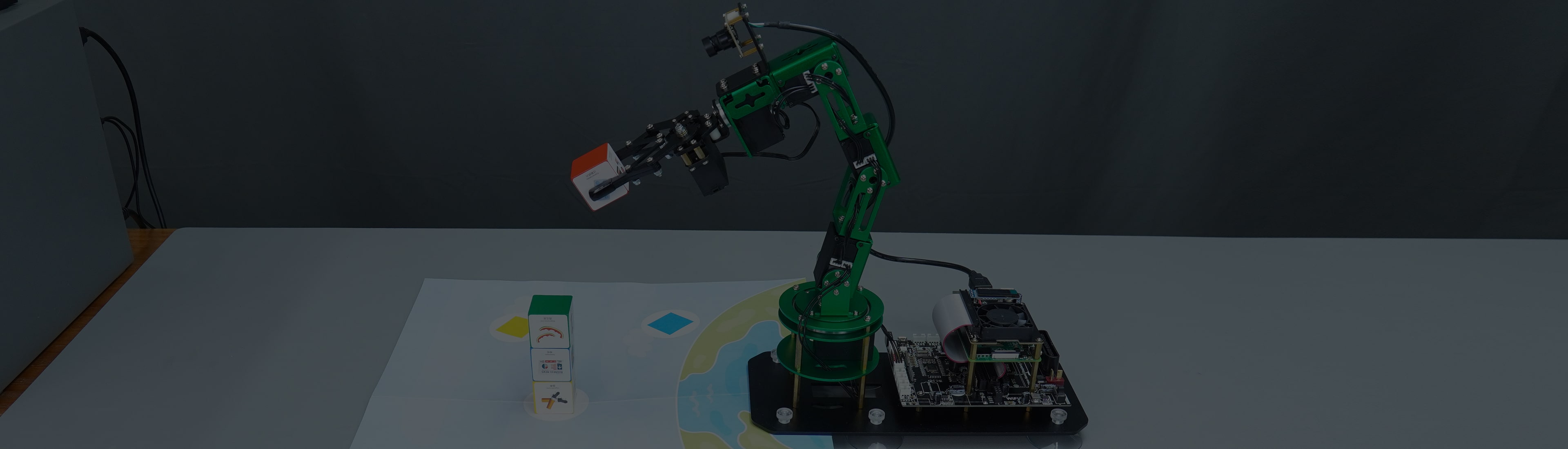
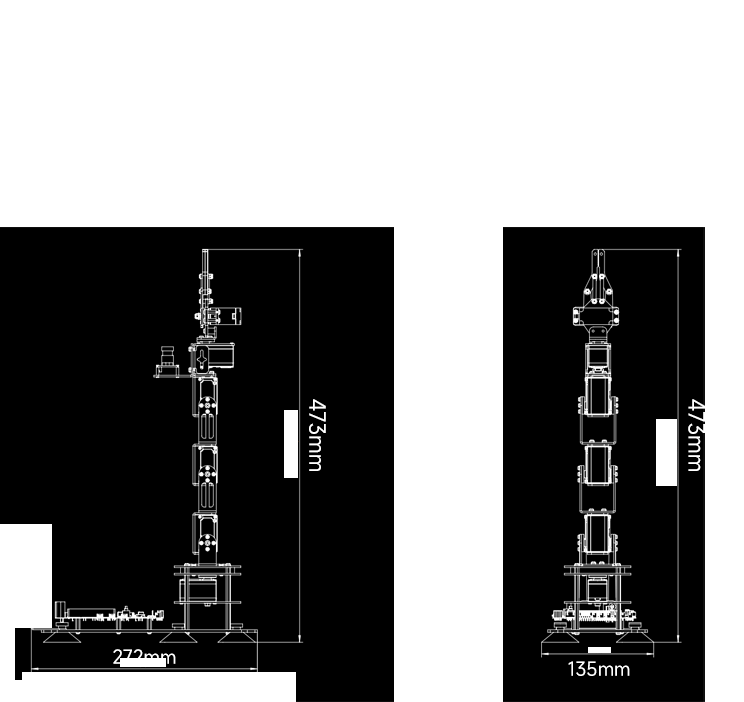
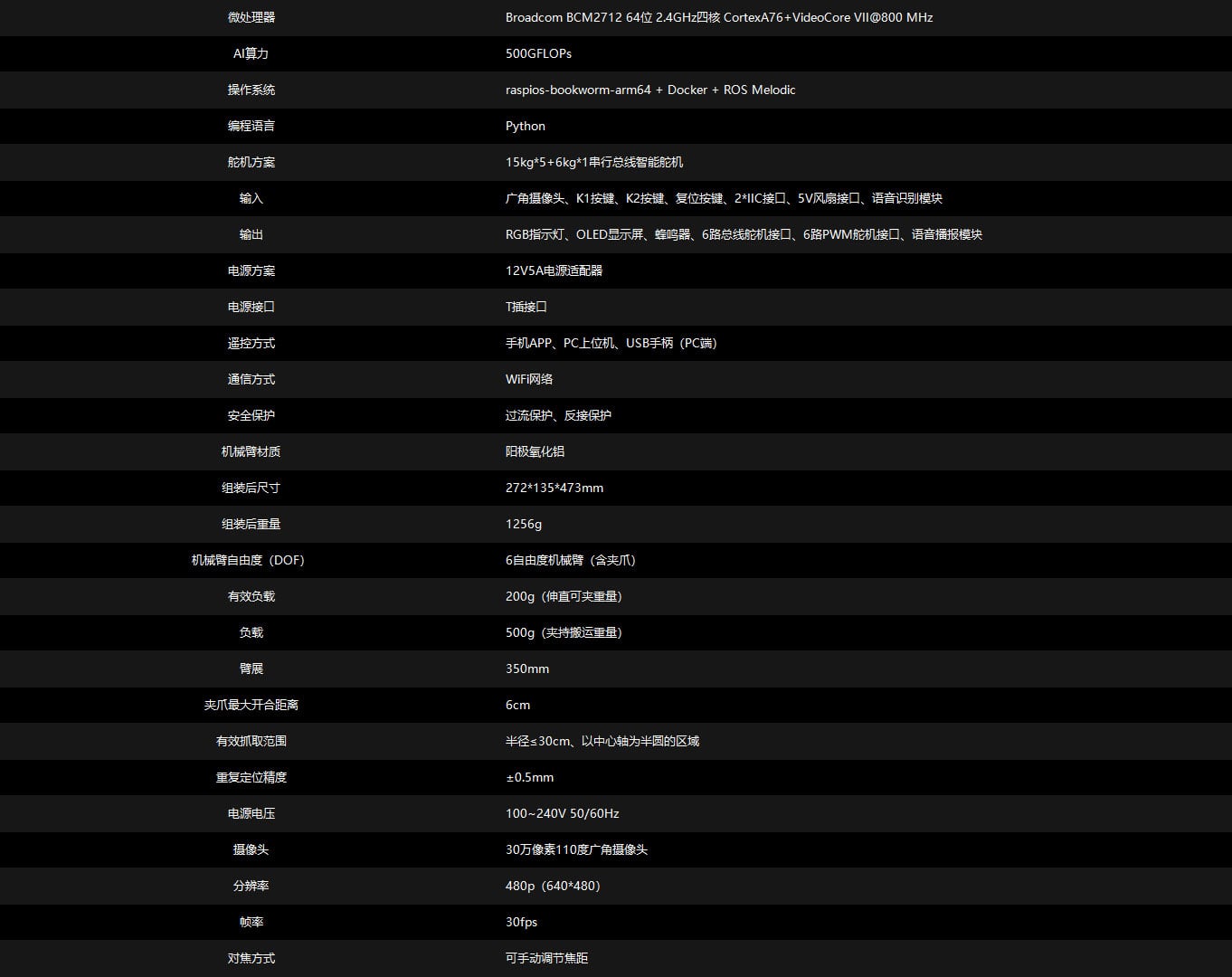
DOFBOT AI视觉机械臂(树莓派版)
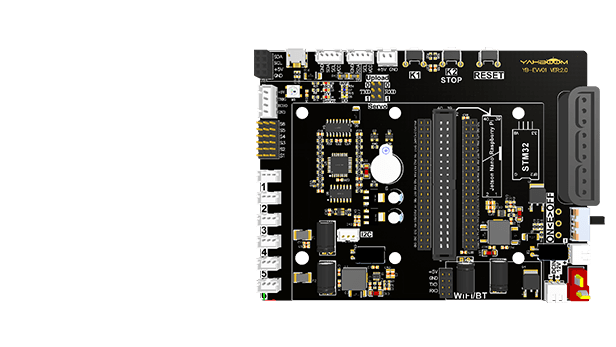
机械臂全功能控制板,支持STM32核心板直插,支持驱动串口总线舵机与PWM舵机,具有串口、手柄、I2C控制接口,支持USB一键下载,提供机械臂控制通讯协议,方便二次开发。
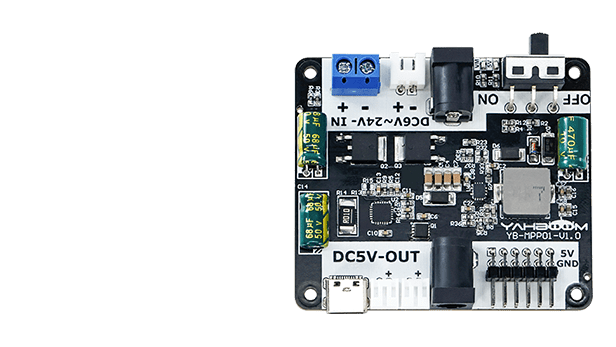
机器人稳压电源扩展板是专为树莓派5设计的供电转接板,集多种输入、输出接口与稳压电路于一体,支持将输入电压稳定转换为5V/5A输出,满足树莓派5供电规范,有效避免树莓派5低电压与USB限流警告,支持与树莓派5叠层安装,适用于机械臂、机器人等各类树莓派5移动供电场景。
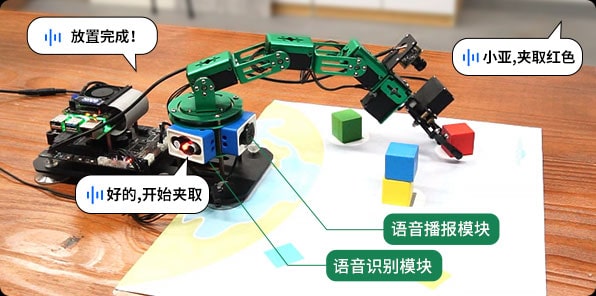
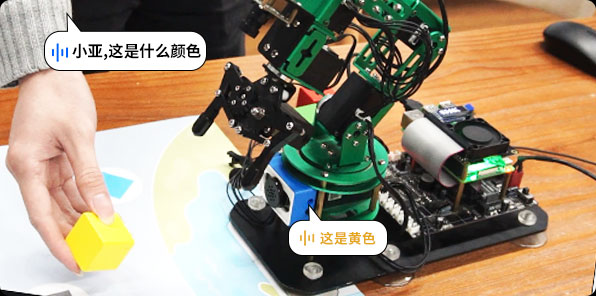
将语音识别控制、语音播报与DOFBOT机械臂的AI视觉图像处理相结合,实现人与机械臂的AI视觉+语音互动玩法。
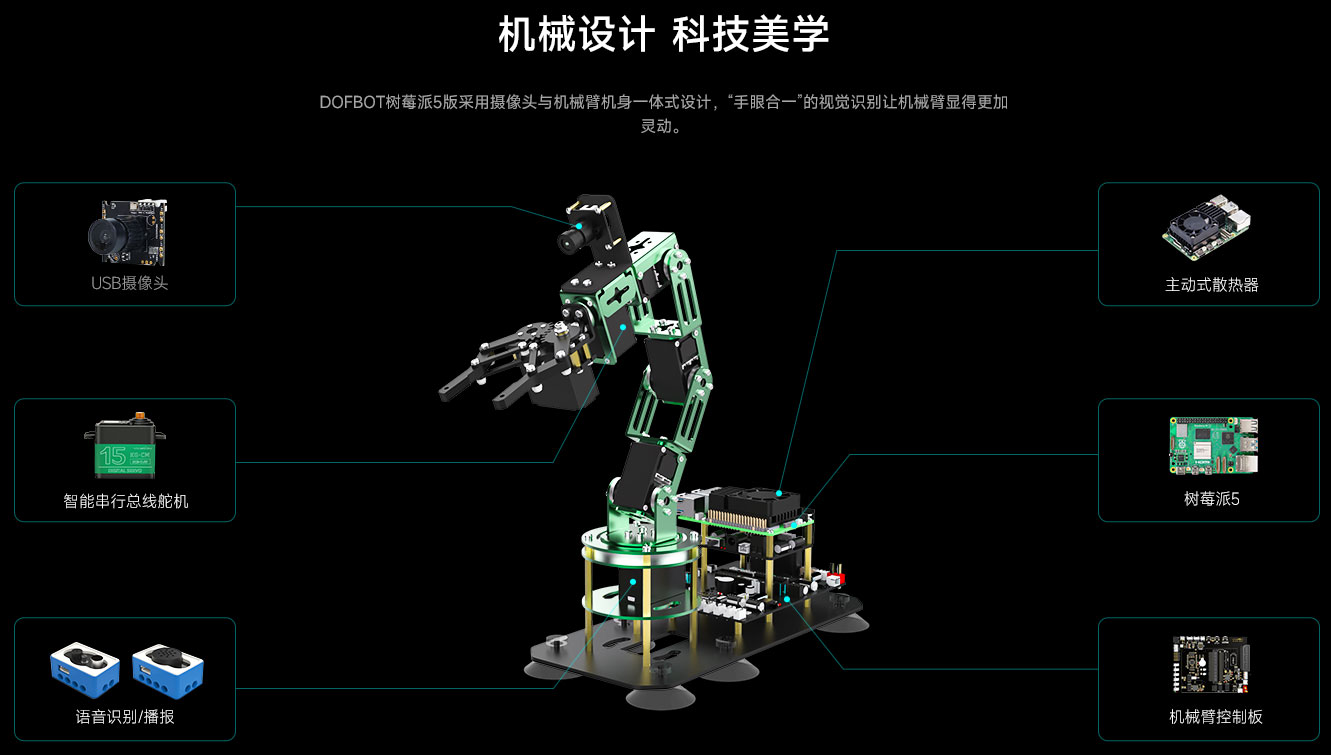
机械臂机身搭配5个15KG总线舵机,夹爪搭配1个6KG总线舵机,支持回读舵机位置、状态等信息,内置金属齿轮,耐磨耐用,高精度进口电位器,有效使用延长寿命,板载防反接接口,可进行级联控制。
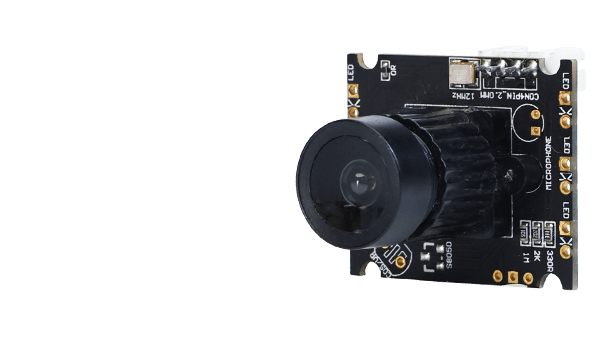
机械臂搭载的USB摄像头拥有30万像素、110度视场角、480p分辨率、30fps帧率,可以提供高质量的图像采集和灵活的焦距控制。
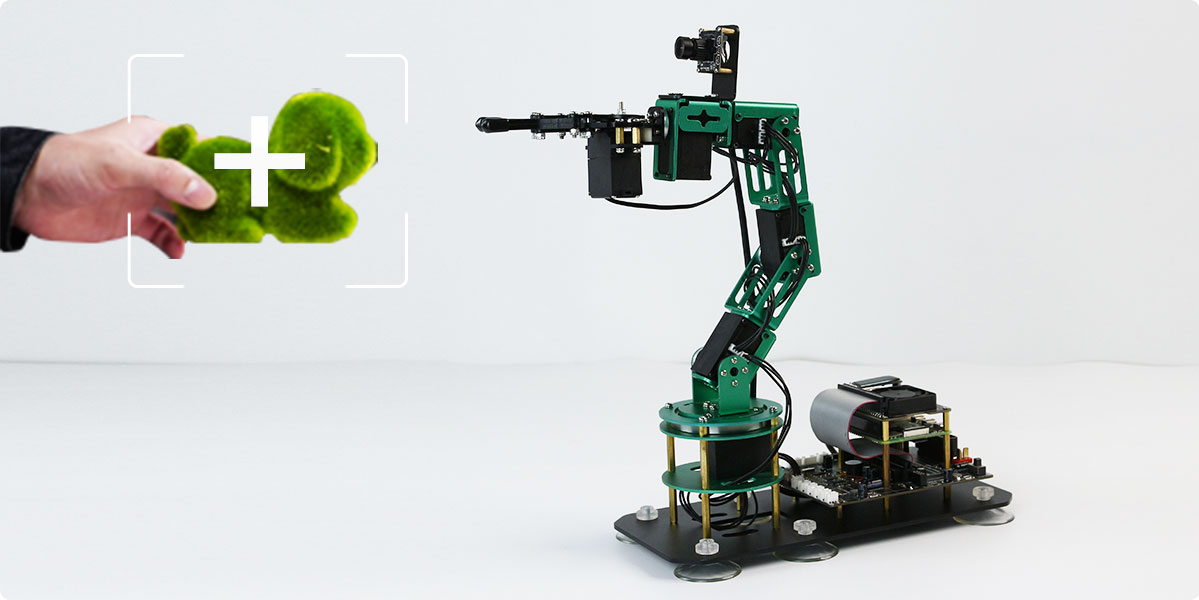
除了标准颜色外,还可提取自定义颜色进行机械臂颜色识别追踪,实现眼随手动。
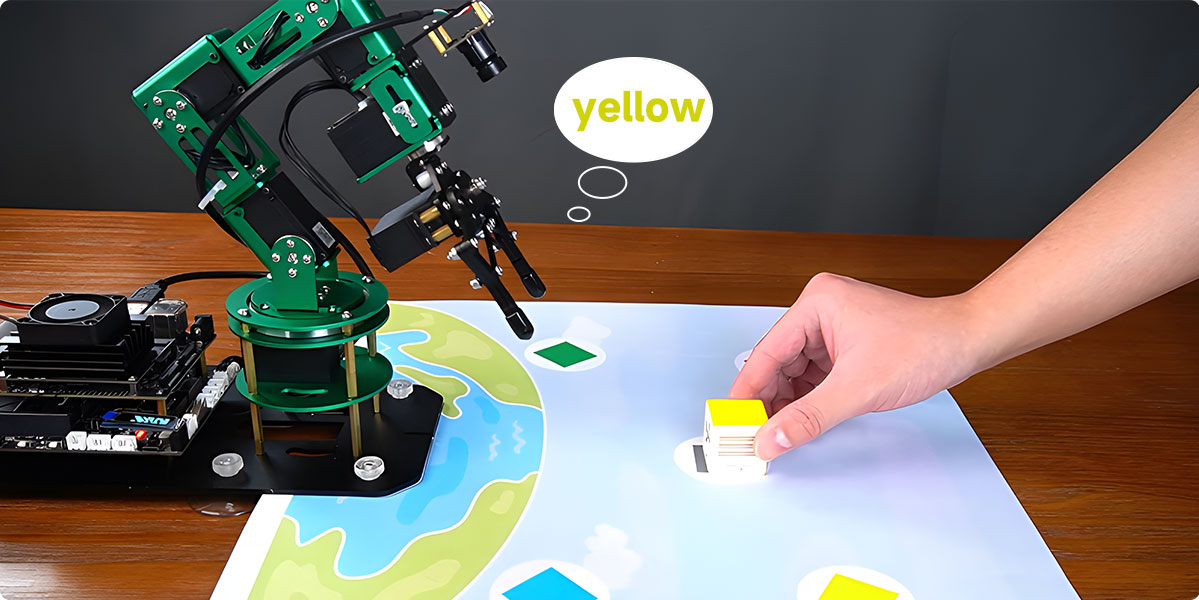
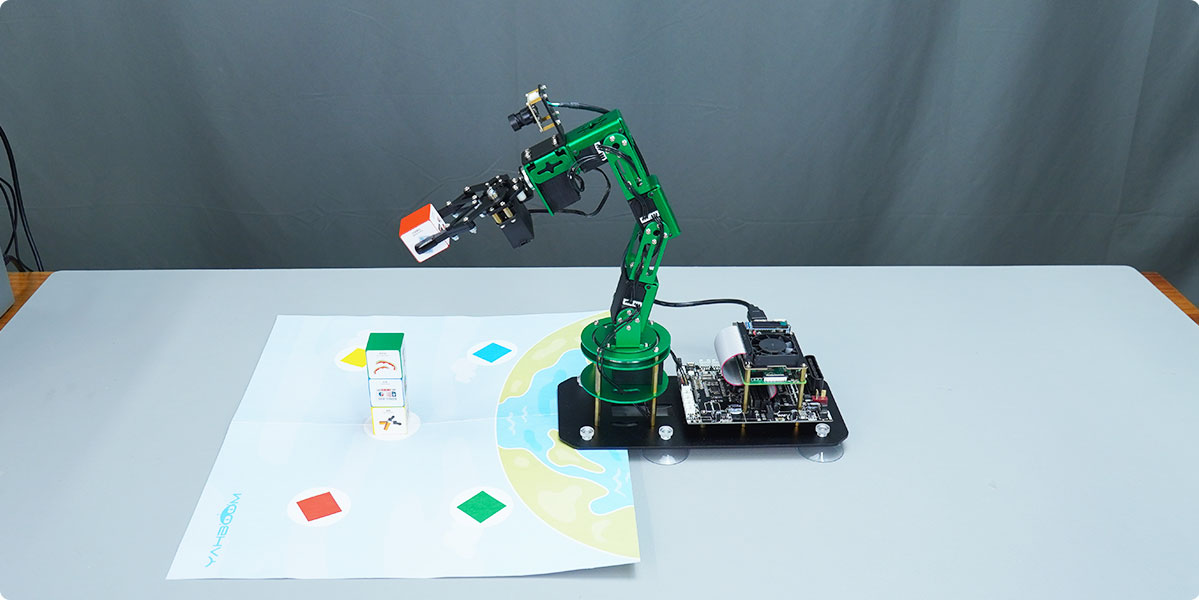
将木块放置到地图识别区域内,机械臂会自动分辨当前的颜色并将木块夹到地图(标配)对应颜色区域。
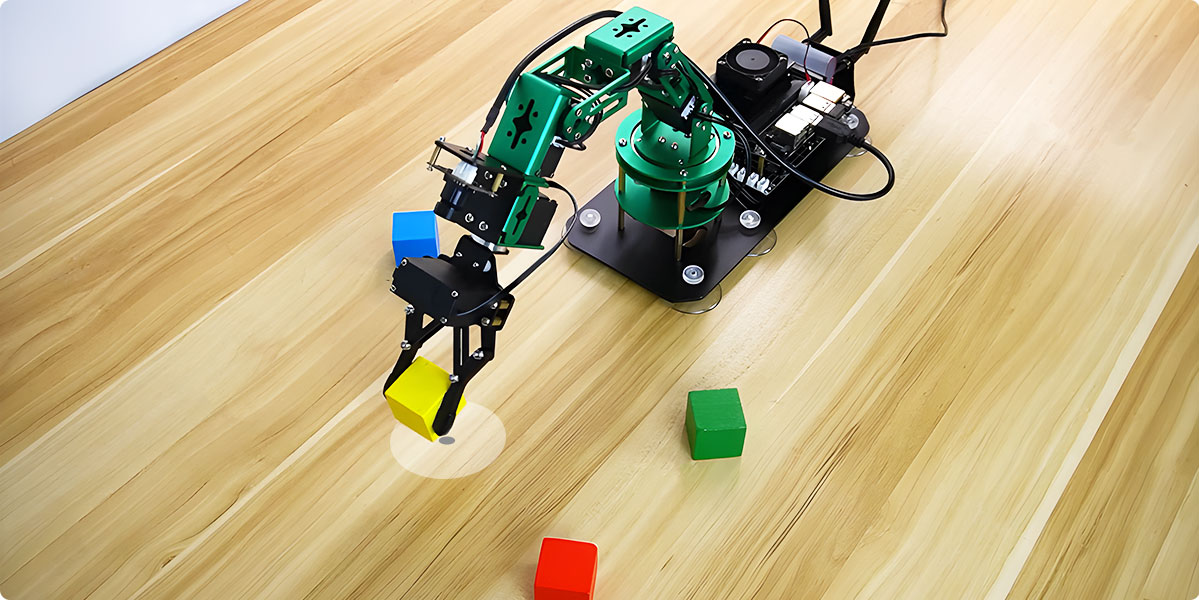
将木块放到摄像头前,机械臂识别到木块颜色后将对应颜色区域的木块夹到中间区域。
选择dofbot喜好颜色,它将会前后跟随目标颜色,你进我退,你退我进。
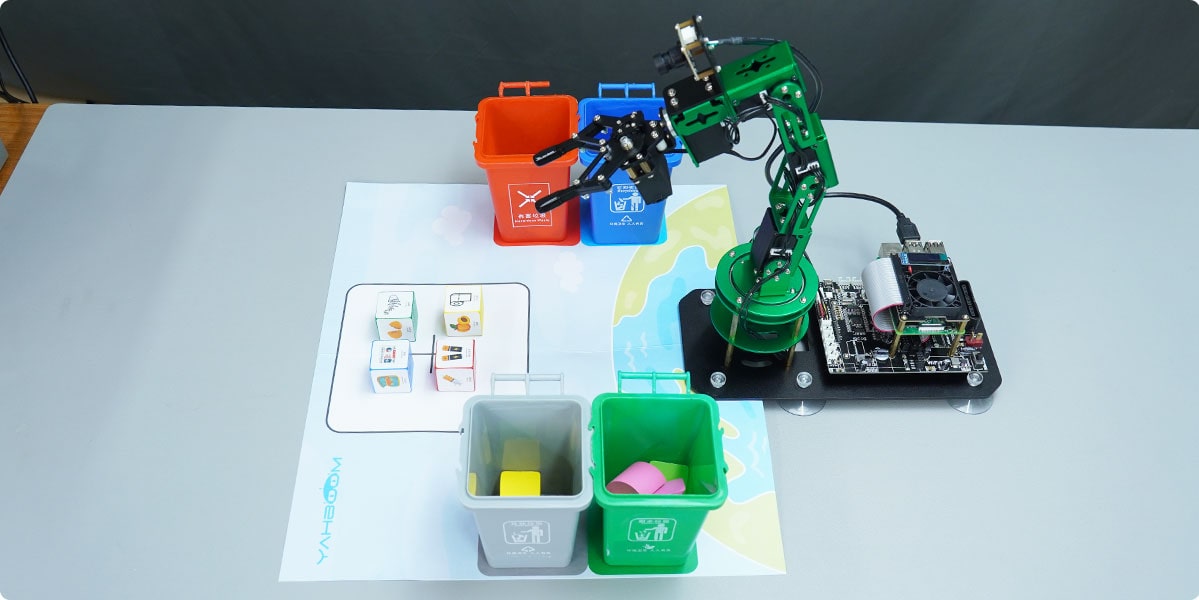
通过加载垃圾分类模型,可识别木块上的垃圾分类,机械臂将“垃圾”分拣到地图对应的分类区域。
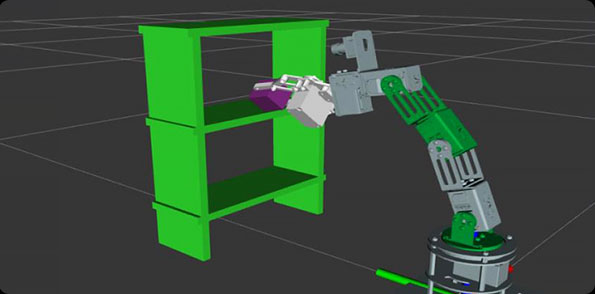
机械臂将地图上的木块夹取到中间位置进行堆叠。
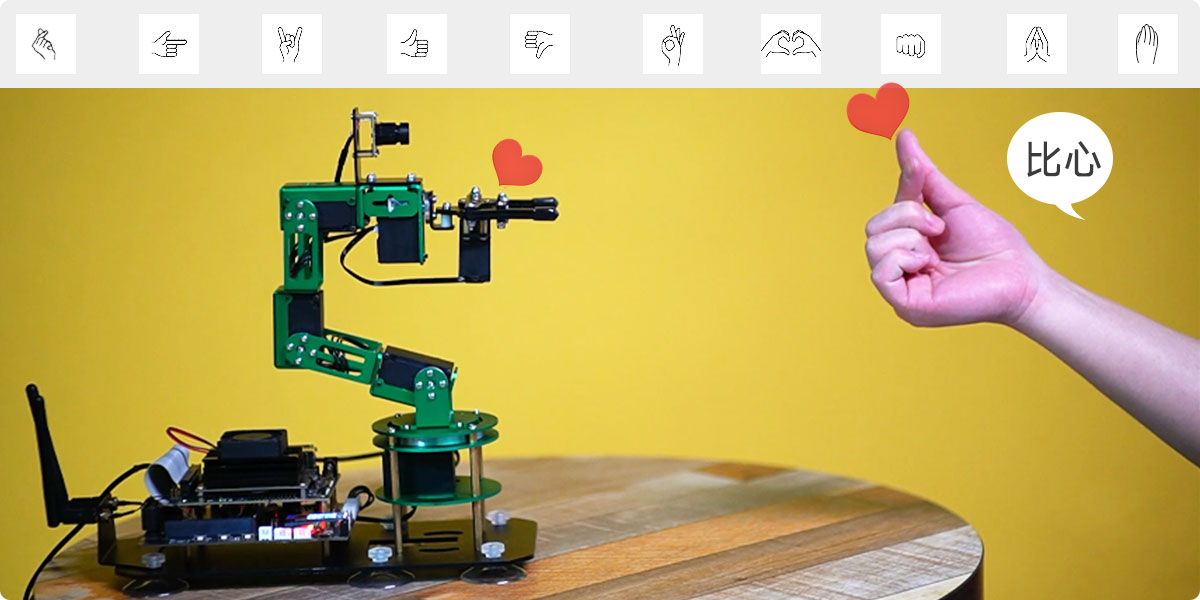
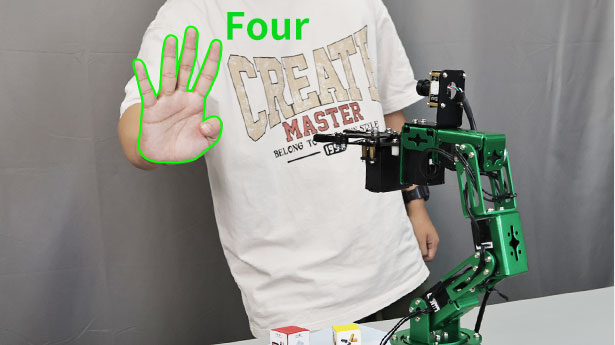
Dofbot可识别多种手势并执行相应动作进行互动。
识别数字手势,堆叠对应层数,最后在“拳头”手势下推倒已堆叠的木块。
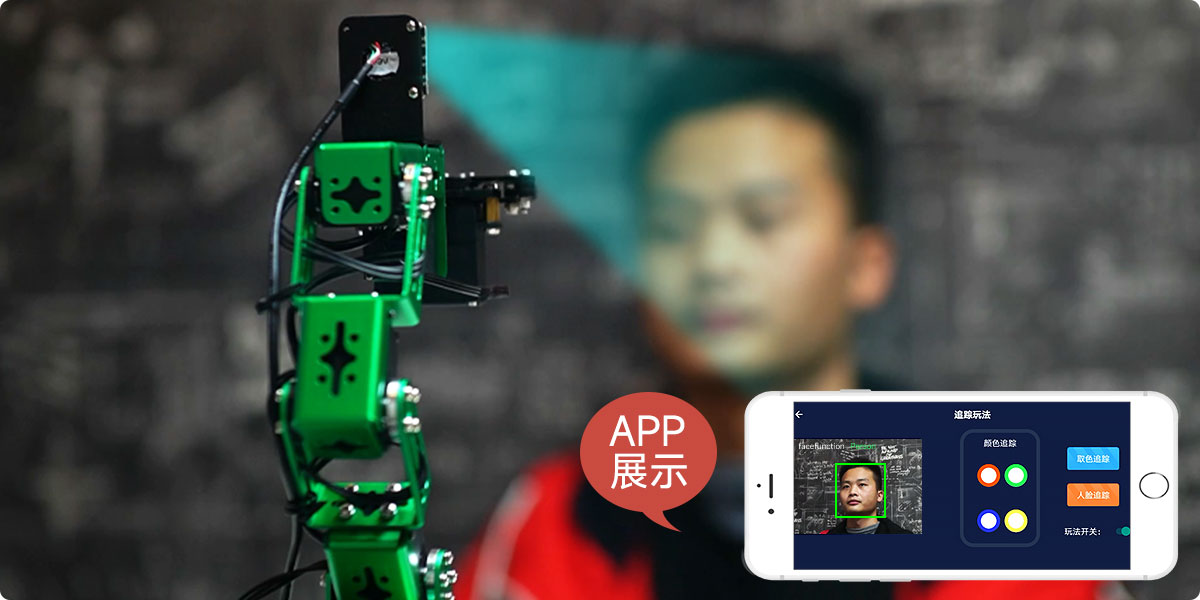
检测当前画面是否有人脸,识别到人脸后进行标记并跟随移动。
内置多种AI玩法,可实时观看机械臂识别画面并同时支持:手势互动移动追踪、垃圾分拣等玩法。
立即下载
除了手机APP和电脑控制外,还标配USB游戏手柄,体验多自由度与多键位的结合乐趣。
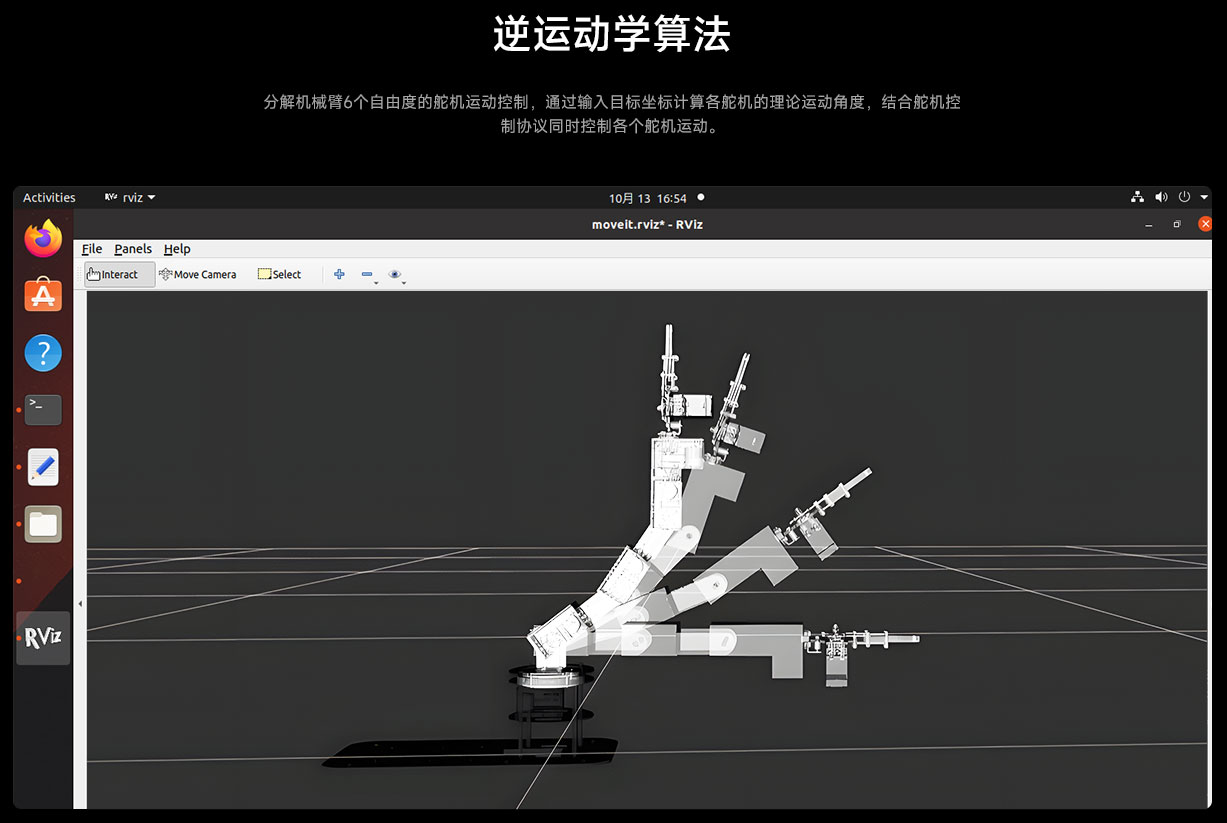
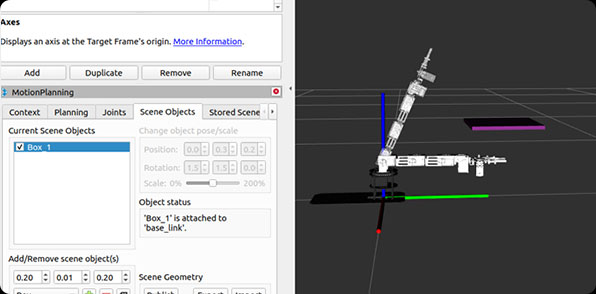
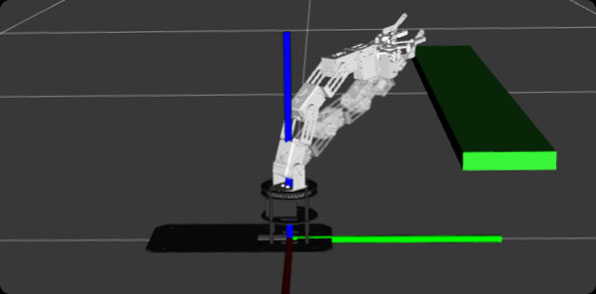
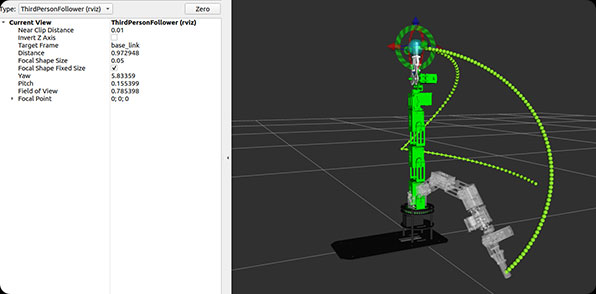
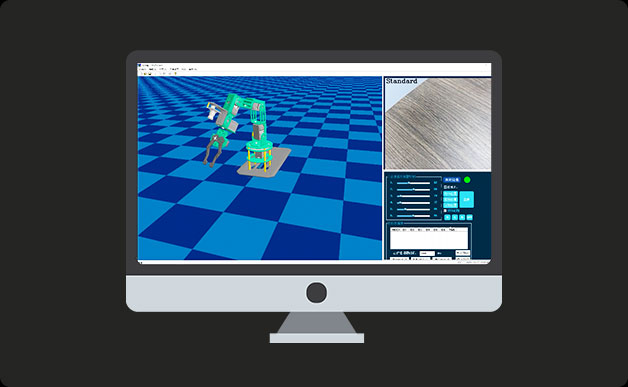
上位机除了FPV摄像头视频画面外,还新增了机械臂3D仿真模型,3D模型与实体同步转动,让机械臂控制理论与实践相结台。
亚博智能配备精心研发的配套课程资料,提供基础理论知识与实操案例教程,内容由浅入深,方便用户快速上手学习。
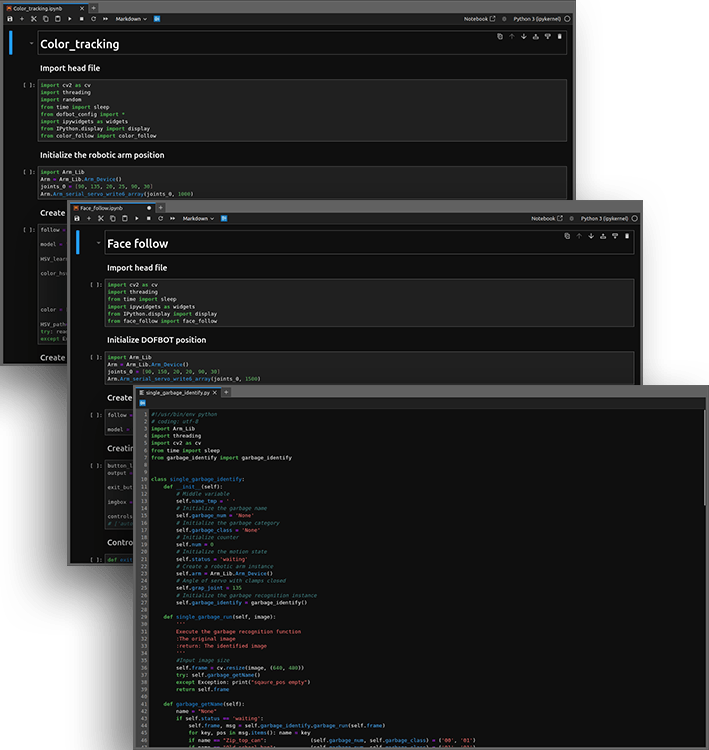
程序代码开源,让技术更自由,让创新更简单。