ROSMASTER R2L
专为ROS机器人小车开发设计,可控制驱动麦轮、阿克曼、四轮差速、两轮差速、全向轮、履带等机器人底盘,ROS主控可通过扩展板预留的microUSB串口接口和CAN总线接口进行通信控制,同时扩展板预留5V和12V电源接口给ROS主控供电。具备5V/7.4VPWM舵机和串行总线舵机驱动接口。
USB3.0HUB扩展板旨在解决主板USB接口不足、USB外设增加导致供电不足等问题,它通过使用USB3.0通信的接口和HUB芯片扩展4个USB接口,保障接口高速数据传输;支持ROS机器人/小车、树莓派/Jetson系列主板,无需驱动,即插即用。
摄像头支持120°广视角,拥有2MP像素和高帧率画面,成像画面清晰流畅,适合AI视觉识别和自动驾驶项目。
搭配大容量锂电池组,足量无虚标,续航时间更久,为小车提供源源不断的动力。
520电机自带高精度磁编码器,马力强劲性能优秀,超越步进电机,电机搭配AB相增量式霍尔编码器,具有精度高,抗干扰能力强等特点。
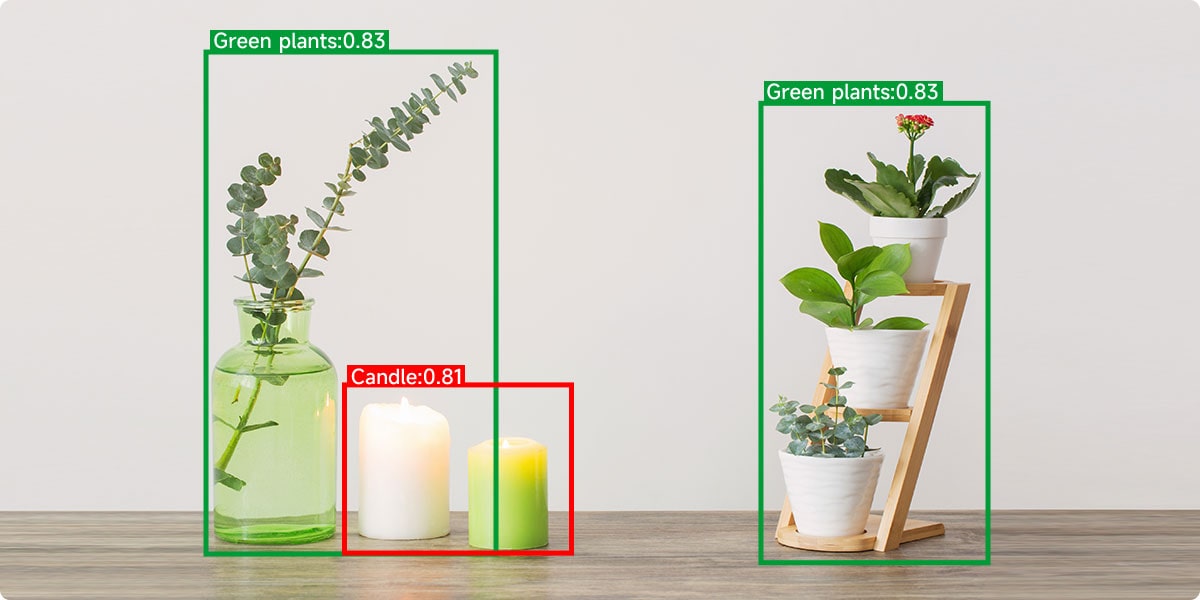
R2L可在沙盘上模拟道路自动驾驶,搭载了yolov5识别交通标志可以在自动驾驶过程中,检测识别出交通标志,并且做出运动决策。
支持自定义颜色选择,机器人可自动识别颜色区域巡线行驶。
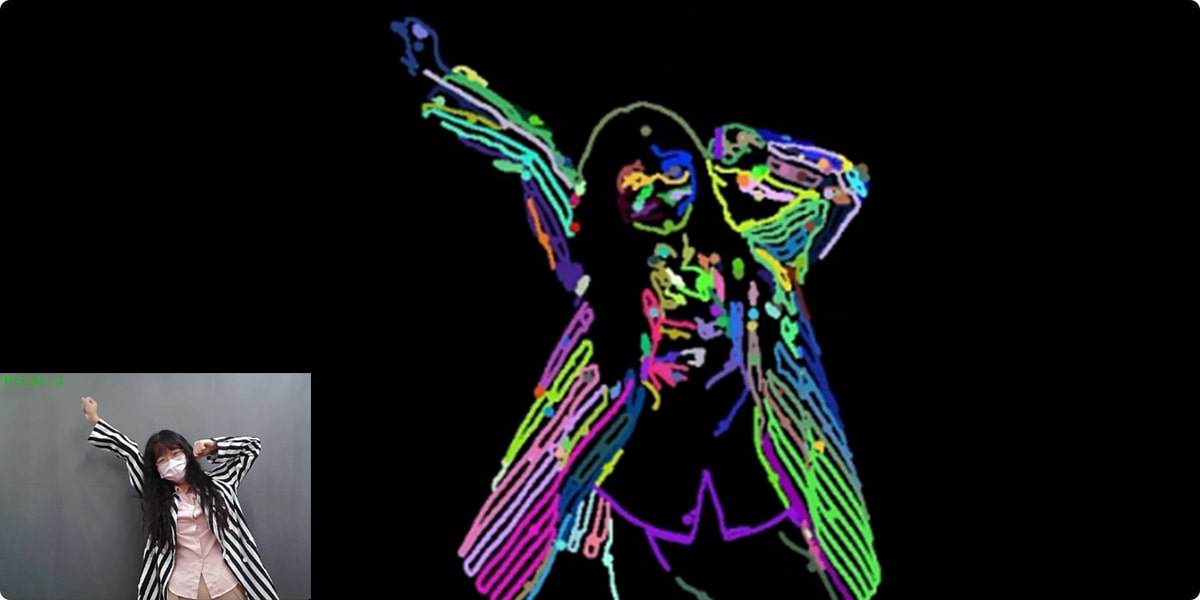
通过MediaPipe开发框架完成手部检测、姿态检测、整体检测、面部检测、三维检测识别等功能。
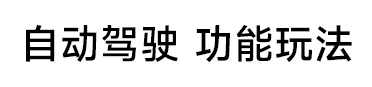
支持二维码标签动态跟踪检测,并实时获取二维码位姿坐标。
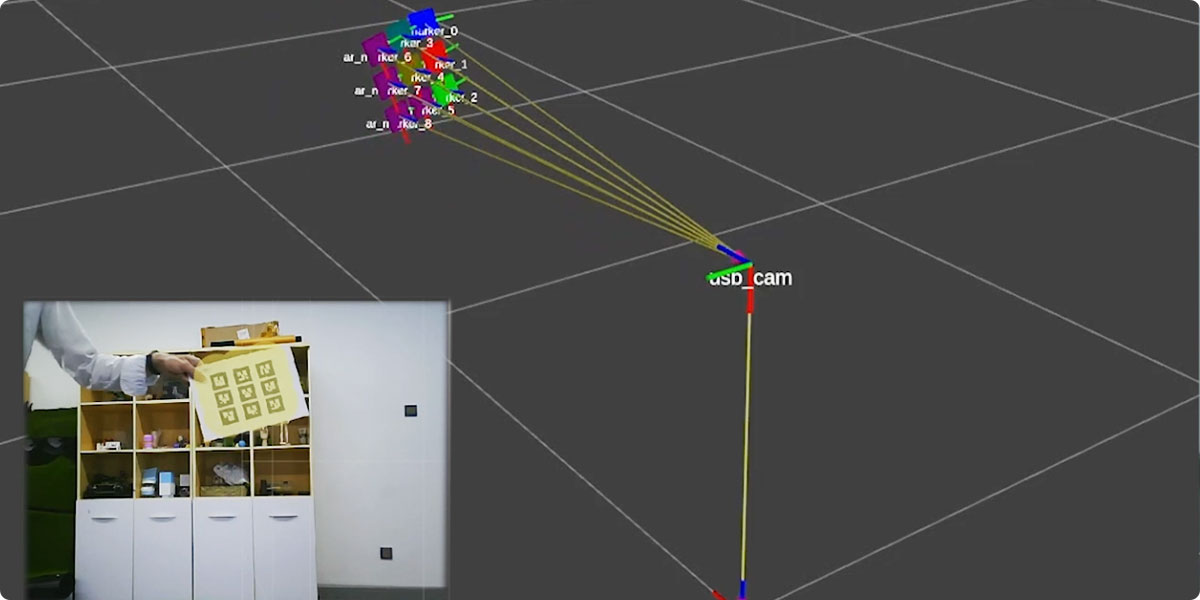
将虚拟信息与真实世界巧妙融合,通过AR增强现实技术把图形呈现在棋盘格纸上。
KNN算法原理/Tensorflow2.0/Pytorchyolov4-tiny/yolov5和TensorRT加速。
通过OpenCV对视频画面进行图像转化,运用相应的算法,达到图像美化效果。
支持安卓/IOS手机APP控制
方便机器人控制、建图、采集数据、训练等操作。
突破传统遥控的局限,只需敲击键盘上的按键,即可轻松实现小车前进、后退、左右转向等动作。
用户可以直观地编写、运行Python代码,实时监控并调整智能小车的各项参数,通过简洁明了的代码,可以让没有编程经验的初学者迅速上手,感受编程逻辑与小车同步控制的乐趣。
点击查看
配备精心研发视频课程与丰富学习资料,内容由浅入深轻松学习。
原创中英文视频教程,资深ROS工程师手把手带您玩转ROSMASTER。
程序代码开源,让技术更自由,让创新更简单。