线上课程
产品中心
解决方案
动态分享
线上商城
∨
天猫旗舰店
京东旗舰店
软件下载
∨
控制软件
编程软件
关于我们
×
暂无结果
轮式小车底盘V2
课程资料
资料汇总下载
配套软件下载
百度网盘使用教程
提取码获取
官方商城
搜索
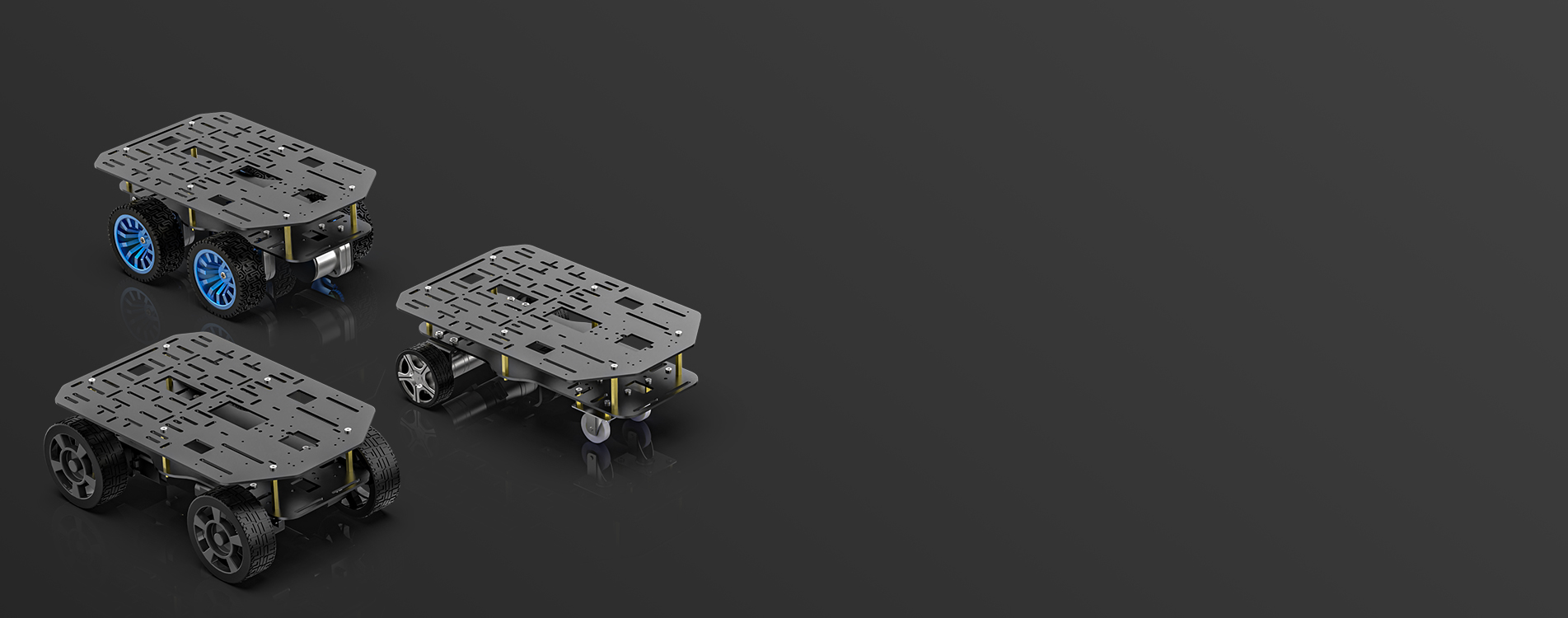
轮式小车底盘V2
•宽度小于15cm,电子设计竞赛专用
•支持多款编码器电机,两驱四驱可选
•全铝合金车架,支持大量竞赛配件
•支持MSPM0/STM32处理器
底盘安装教程
底盘安装步骤
底盘传感器安装步骤1
底盘传感器安装步骤2
四路电机驱动板驱动教程
电机介绍与调试
1.常用电机介绍以及用法
2.PC上位机调试
IIC通讯驱动
1.MSPM0驱动案例
2.STM32驱动案例
3.ESP32驱动案例
4.Arduino驱动案例
5.PICO2驱动案例
6.Jetson Nano驱动案例
7.树莓派5驱动案例
8.RDK X5驱动案例
串口通讯驱动
1.MSPM0驱动案例
2.STM32驱动案例
3.ESP32驱动案例
4.Arduino驱动案例
5.PICO2驱动案例
6.Jetson Nano驱动案例
7.树莓派5驱动案例
8.RDK X5驱动案例
机器人车型扩展教程
运动学分析之两驱车型
运动学分析之四驱车型
MSPM0底盘开发教程
MSPM0基础课程
1.MSPM0介绍
MSPM0开发环境搭建
1.CCS Theia开发
2.MDK Arm开发
3.UniFlash下载程序
4.DAP-LINK下载程序
5.程序仿真与调试
6.工程移植
MSPM0 Keil环境基础例程
1.点亮LED灯
2.系统延时
3.按键控制
4.外部中断
5.串口通信
6.定时器
7.PWM呼吸灯
8.ADC采集
9.DMA传输
10.获取MPU6050数据(I2C)
11.屏幕显示(SPI)
MSPM0 CCS环境基础例程
1.点亮LED灯
2.系统延时
3.按键控制
4.外部中断
5.串口通信
6.定时器
7.PWM呼吸灯
8.ADC采集
9.DMA传输
10.获取MPU6050数据(I2C)
11.屏幕显示(SPI)
MSPM0机器人扩展板例程
1.MSPM0机器人扩展板介绍
2.自定义按键控制
3.驱动蜂鸣器
MSPM0底盘传感器扩展教程
三路巡线
四路巡线
八路巡线
CCD摄像头巡线
电磁巡线
电动云台控制
手柄控制
舵机超声波避障
蓝牙遥控
K210自动驾驶
K210颜色跟随
K210手写数字动作
K210颜色反应
K210路标指示动作
K210跟随机器码
K210二维码指令
K230视觉巡线
K230颜色追踪
K230颜色反应
K230路标识别
K230机器码追踪
K230二维码识别动作
K230自主避让
K230车牌追踪
K230人脸追踪
K230注视方向跟随
K230手掌追踪
K230目标追踪
K230人体跟随
K230OCR字符识别动作
STM32底盘开发教程
三路巡线
四路巡线
八路巡线
CCD摄像头巡线
电磁巡线
电动云台控制
手柄控制
舵机超声波避障
蓝牙遥控
K210自动驾驶
K210颜色跟随
K210手写数字动作
K210颜色反应
K210路标指示动作
K210跟随机器码
K210二维码指令
K230视觉巡线
K230颜色追踪
K230颜色反应
K230路标识别
K230机器码追踪
K230二维码识别动作
K230自主避让
K230车牌追踪
K230人脸追踪
K230注视方向跟随
K230手掌追踪
K230目标追踪
K230人体跟随
K230OCR字符识别动作
历年国赛赛题
2024年自动行驶小车(H题)
下载专区
底盘模型
程序源码汇总
有问必答
提问:
目录
底盘安装教程
四路电机驱动板驱动教程
机器人车型扩展教程
MSPM0底盘开发教程
STM32底盘开发教程
历年国赛赛题
下载专区
有问必答
 1.常用电机介绍以及用法
1.常用电机介绍以及用法 






