
MicroROS-Pi5
•基于树莓派5开发,ROS2基础入门•SLAM建图导航,多机同步控制
•二自由度摄像头云台,AI视觉交互
•TOF激光雷达,带建图导航APP
 1、ROS2简介
2、ROS2安装Foxy
3、ROS2集成开发环境搭建
4、ROS2工作空间
5、ROS2功能包
6、ROS2节点
7、ROS2话题通讯发布方实现
8、ROS2话题通讯订阅方实现
9、ROS2服务通讯服务端实现
10、ROS2服务通讯客户端实现
11、ROS2动作通讯服务端实现
12、ROS2动作通讯客户端实现
13、ROS2自定义接口消息
14、ROS2参数服务案例
15、ROS2元功能包介绍
16、ROS2分布式通讯
17、ROS2 DDS
18、ROS2时间相关API
19、ROS2常用命令工具
20、ROS2 rviz2使用
21、ROS2 rqt工具箱
22、ROS2 launch之python实现
23、ROS2 launch之xml、yaml实现
24、ROS2录制回放工具
25、ROS2URDF模型介绍
26、ROS2Gazebo介绍
27、ROS2坐标变换TF2简介
28、ROS2坐标变换TF2案例
1、ROS2简介
2、ROS2安装Foxy
3、ROS2集成开发环境搭建
4、ROS2工作空间
5、ROS2功能包
6、ROS2节点
7、ROS2话题通讯发布方实现
8、ROS2话题通讯订阅方实现
9、ROS2服务通讯服务端实现
10、ROS2服务通讯客户端实现
11、ROS2动作通讯服务端实现
12、ROS2动作通讯客户端实现
13、ROS2自定义接口消息
14、ROS2参数服务案例
15、ROS2元功能包介绍
16、ROS2分布式通讯
17、ROS2 DDS
18、ROS2时间相关API
19、ROS2常用命令工具
20、ROS2 rviz2使用
21、ROS2 rqt工具箱
22、ROS2 launch之python实现
23、ROS2 launch之xml、yaml实现
24、ROS2录制回放工具
25、ROS2URDF模型介绍
26、ROS2Gazebo介绍
27、ROS2坐标变换TF2简介
28、ROS2坐标变换TF2案例
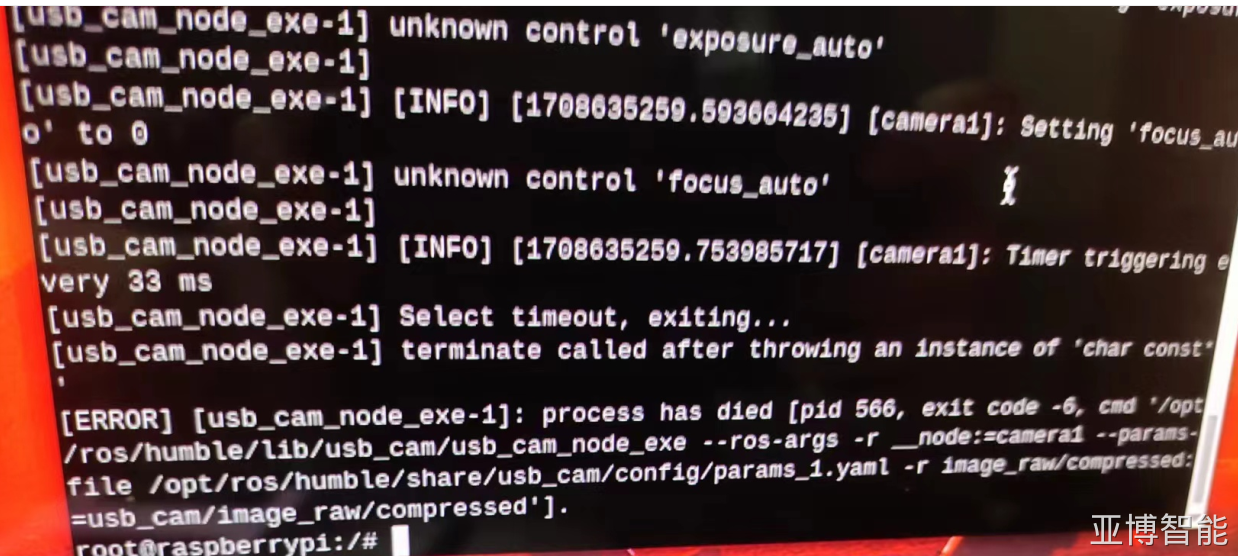
部分用户的在运行摄像头相关案例,可能出现报错和程序终止的现象!
修改摄像头像素格式:mjpeg2rgb → yuyv2rgb
cd /opt/ros/humble/share/usb_cam/config/ vi params_1.yaml
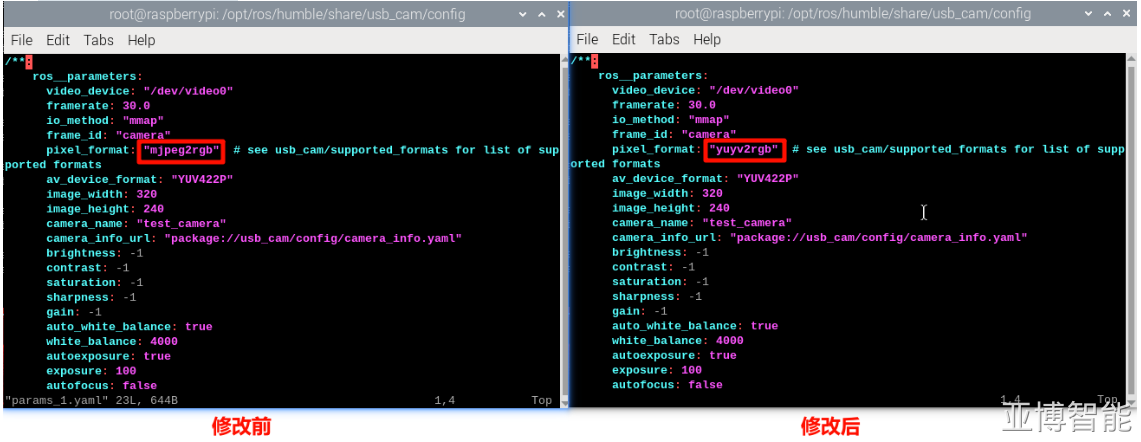
vi编辑器操作:打开文件后,输入i开始编辑,编辑完成后,按ESC,然后输入:wq保存并退出该文件!
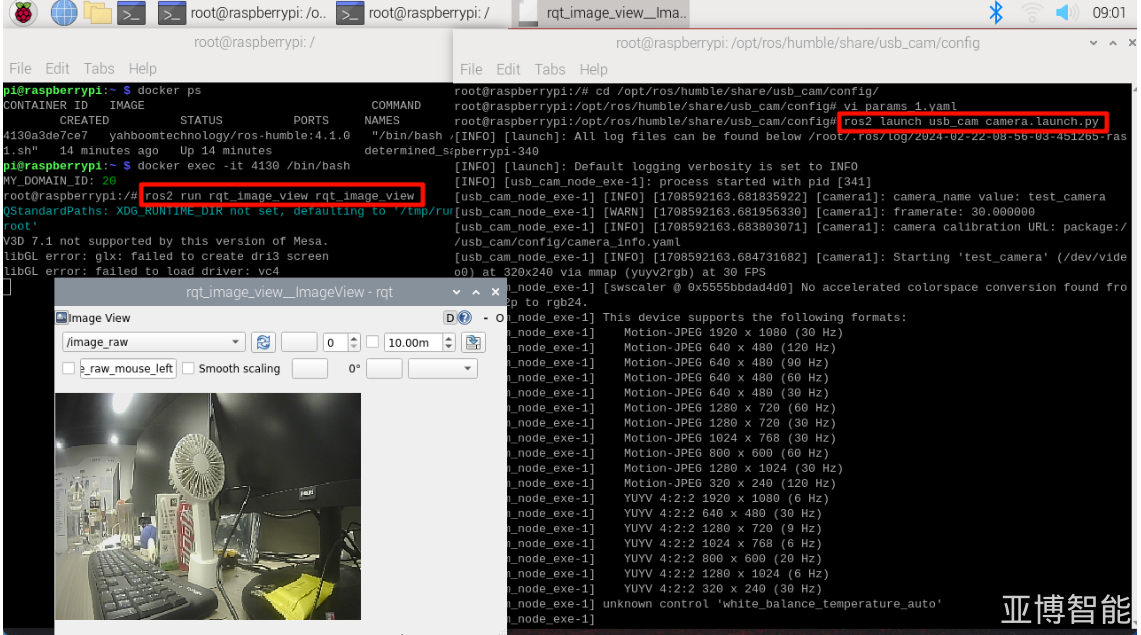
ros2 launch usb_cam camera.launch.py
ros2 run rqt_image_view rqt_image_view
保存镜像不可以退出运行的容器!
docker ps
查看正在运行的脚本,也就是我们修改后的docker镜像。
docker commit
提交正在运行的镜像,版本号建议递增0.1。

提交成功后,我们可以关闭运行的容器。
vi ros2_humble.sh
将版本号修改成我们提交的版本号:4.2.0
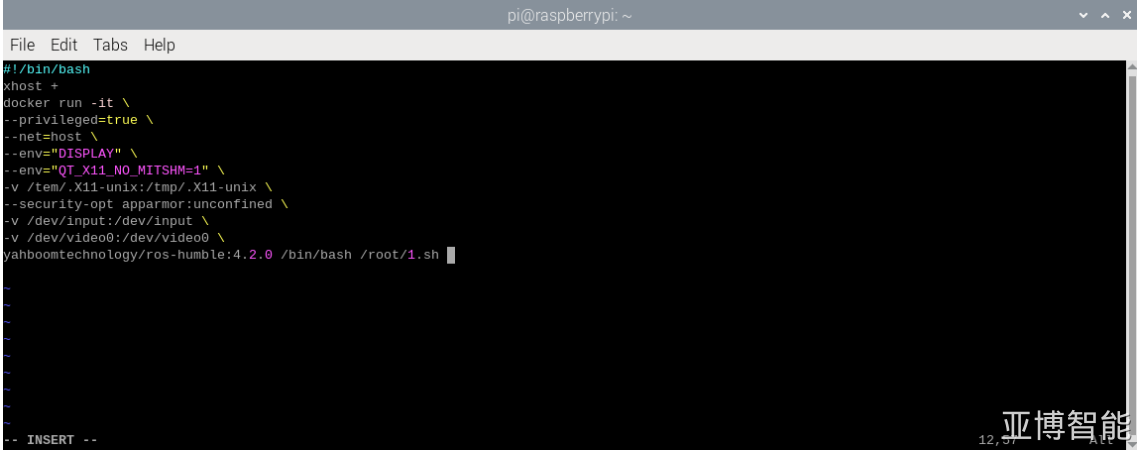
完成以上操作,我们可以重新运行docker脚本!
答:这是因为陀螺仪未初始化好,导致数据异常,解决办法为:在进行建图导航操作前,先将小车断电,并确保其平稳放置于地面。接着,开机启动小车并保持静止状态5秒钟,陀螺仪完成初始化后即可正常建图导航。











回复:您好,将内存卡插入读卡器,然后连接Windows电脑,在Windows电脑中进行格式化后,重新烧录出厂系统即可。