课程更新
课程更新

多种查阅方式
无需繁琐下载,亦可在官网找到产品的所有资料
.png)
.png)
.png)
.png)




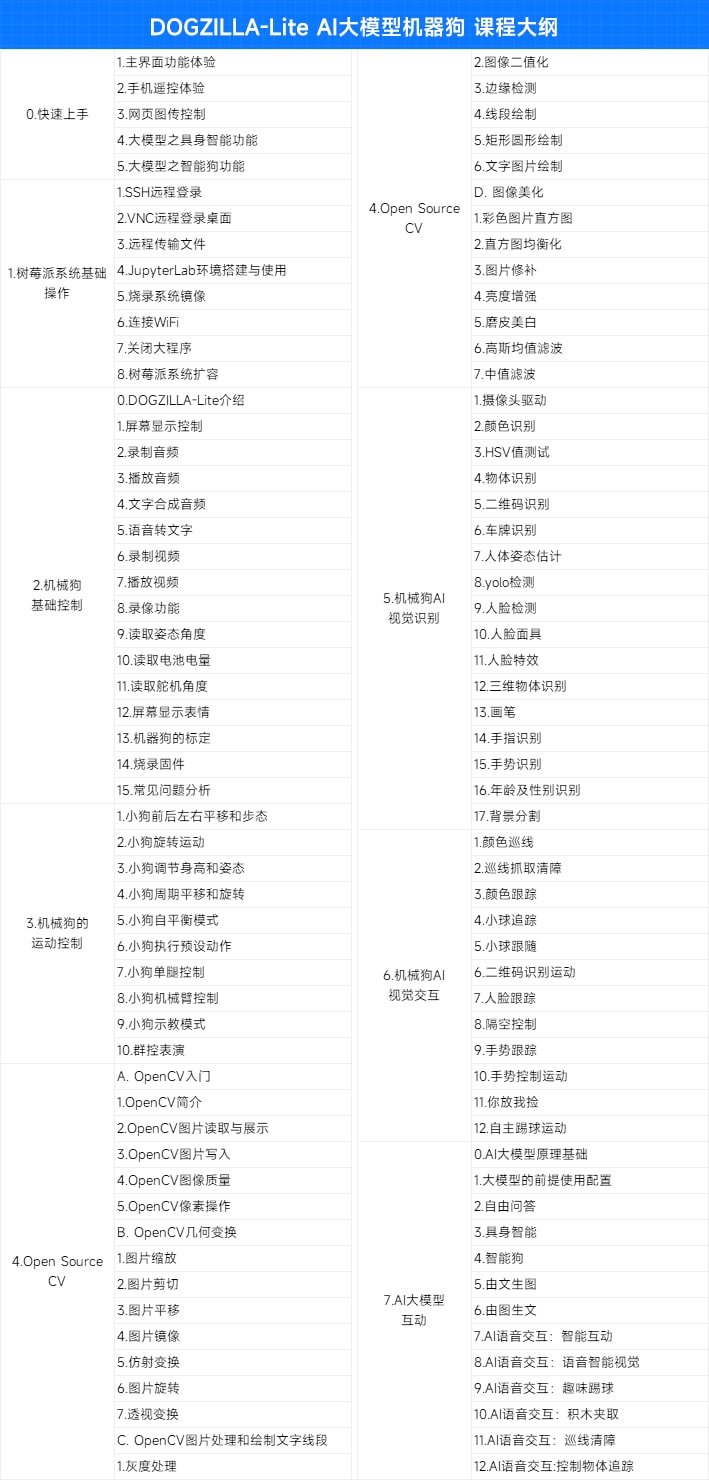
精彩课程预览
丰富的实验课程,学习编程的相关的知识
产品选择
配备精心研发视频课程与丰富学习资料,内容由浅入深轻松学习。
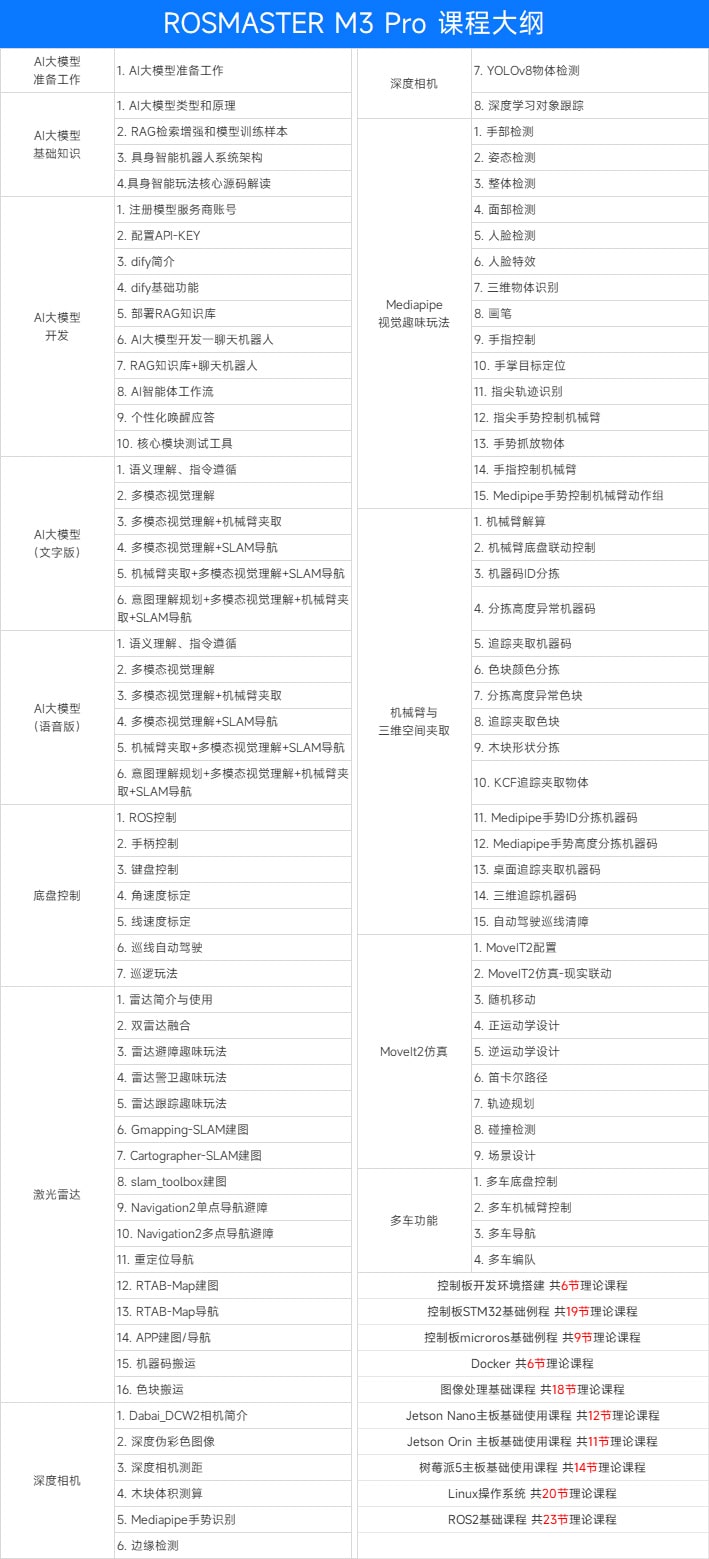
.png) ROSMASTER M3 Pro
ROSMASTER M3 Pro
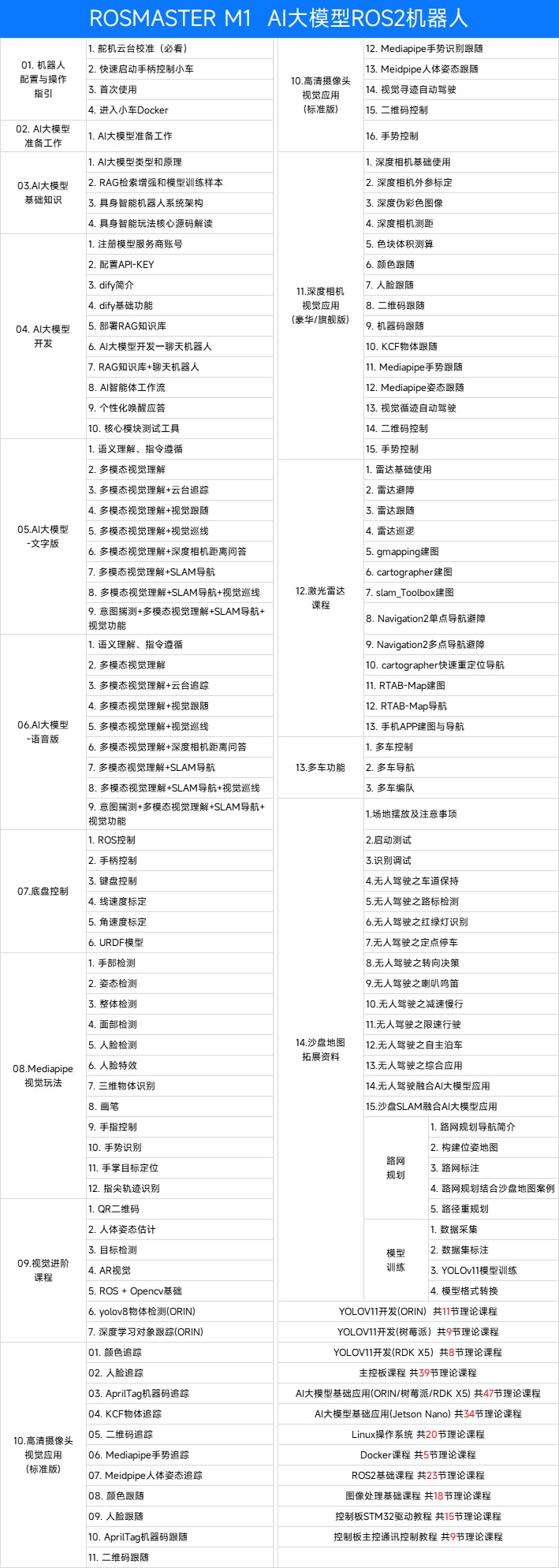
 ROSMASTER M1
ROSMASTER M1
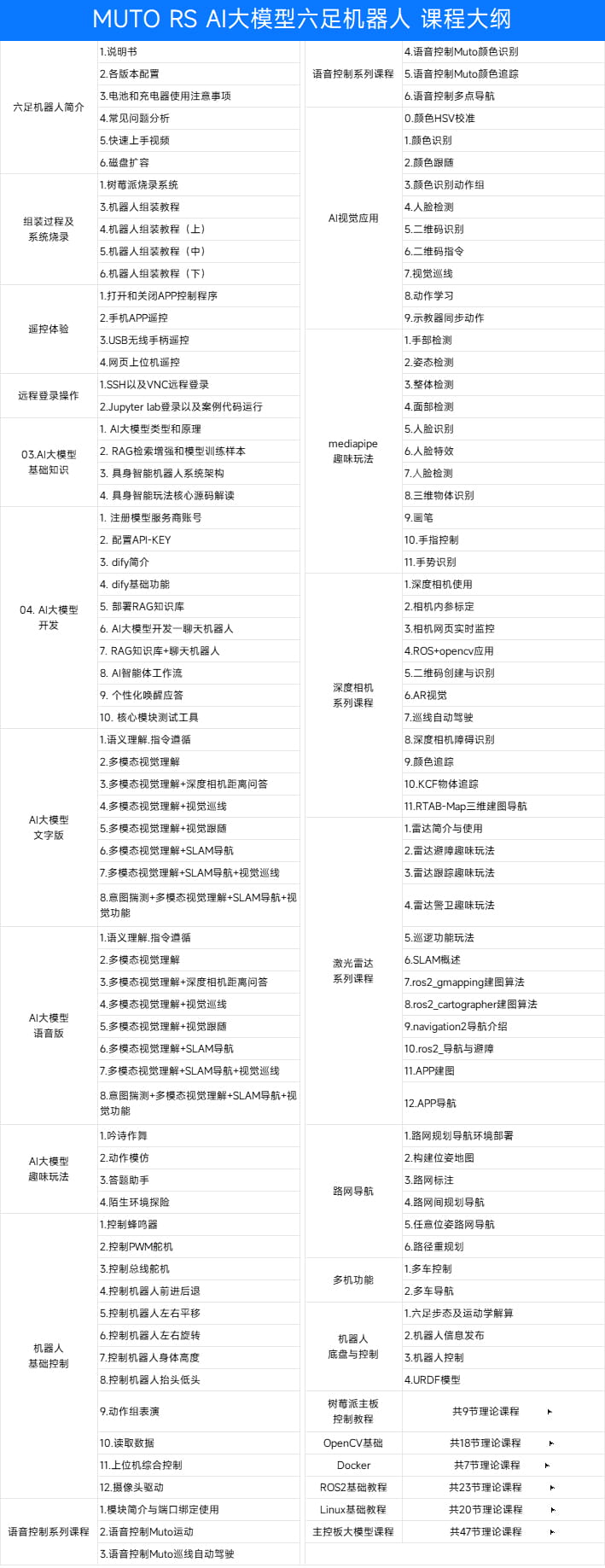
.png) MUTO RS
MUTO RS
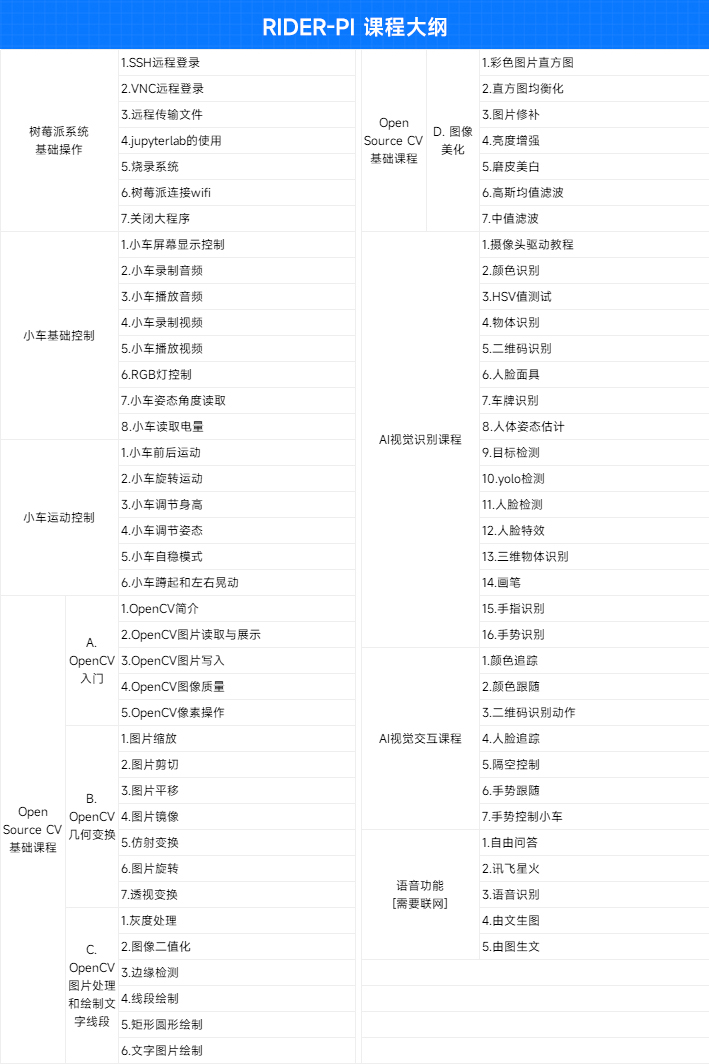
 Rider-Pi
Rider-Pi
 DOGZILLA-LITE
DOGZILLA-LITE
 DOFBOT PRO
DOFBOT PRO