快速上手
一、安装并启动虚拟机
打开浏览器,输入以下网址进入VMware Player虚拟机软件下载页面,并点击下载
https://www.vmware.com/products/workstation-player.html

双击运行VMware虚拟机压缩包文件,然后根据提示安装虚拟机软件。
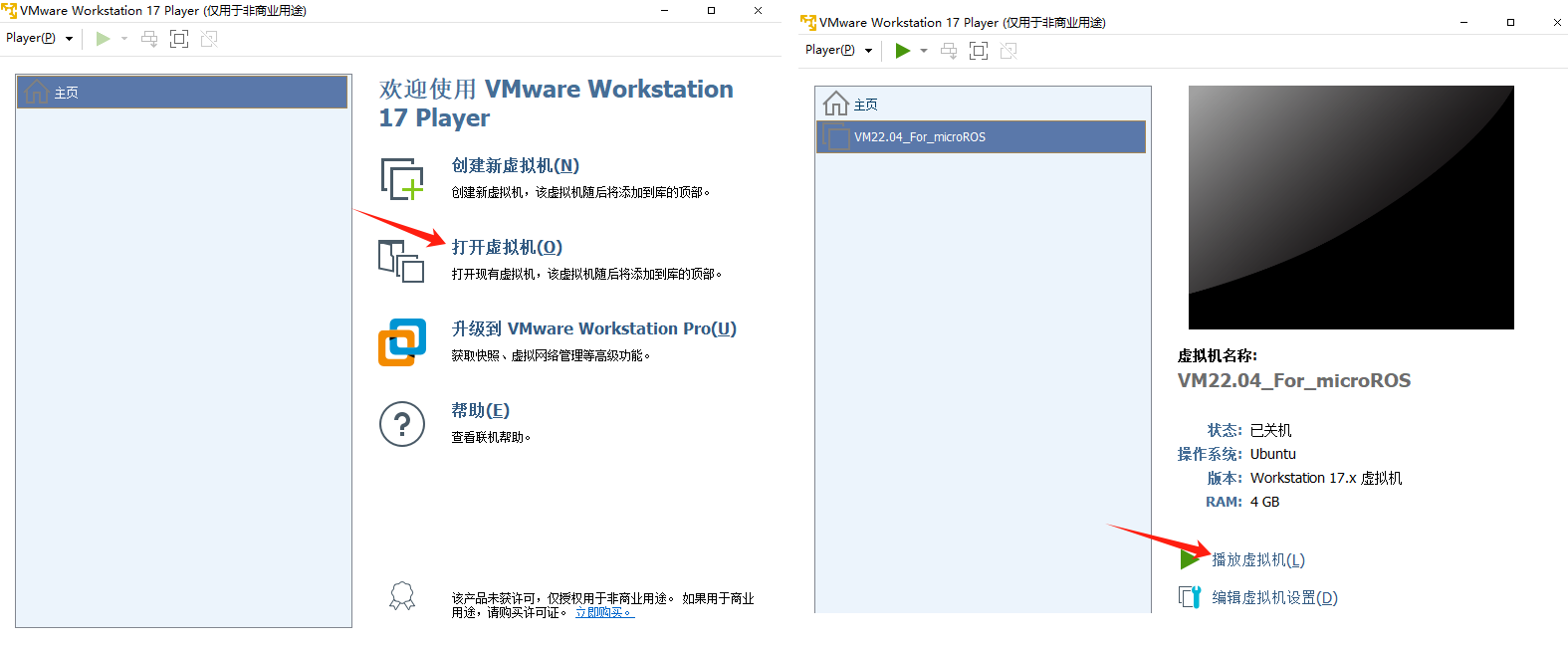
用虚拟机软件打开资料中的虚拟机系统文件,进入虚拟机系统。
二、配置机器人
1.控制板出厂已烧录出厂固件,如果烧录过其他例程的固件,请重烧录出厂固件后,再给板子供电并打开电源开关。
2.将产品资料中附带的配置脚本 (config_robot.py) 文件复制到虚拟机 / 电脑上。
3.如果虚拟机 / 电脑有外接 USB 串口设备,请先暂时移除虚拟机 /电脑的 USB 外接串口设备,然后使用 type-C 数据线连接虚拟机 /电脑与 控制板的串口。此时系统弹窗请选择连接到虚拟机上。
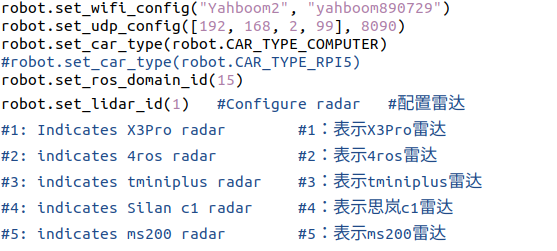
4.编辑 config_robot.py 文件,拉到文件底部,根据自家 WiFi 网络名称和密码更新 set_wifi_config 函数的参数,根据虚拟机 / 电脑的IP 地址更新 set_udp_config 函数的参数,虚拟机 / 电脑版本需要将小车类型设置为 CAR_TYPE_COMPUTER。参数robot.set_lidar_id(4)表示配置文件进行雷达型号选择,其他参数保持默认或者根据需求修改。保存配置文件。
5.配置完参数之后,在配置状态运行以下命令配置机器人,此时查看返回的数据是否和自己设置的一致,一致则表示设置成功。
python3 config_robot.py
6.按一下机器人的复位键重新加载配置,等待IMU初始化完成之后,oled上会显示要选择的警告等级和雷达型号选择,这时候可以通过左右转向手持手枪来切换警告等级和雷达型号,切换到自己所需的位置按下按键确定,下图是如何晃动选择演示。
选择警报等级,选择完按下按键会听到滴的一声表示确定。

选择雷达型号,选择完按下按键会听到滴的一声表示确定
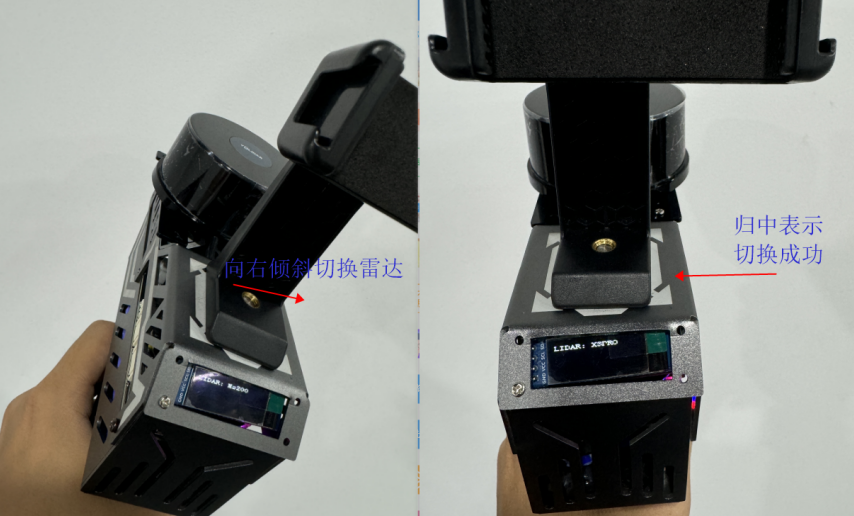
选择完警告等级和雷达型号之后,OLED上会显示所选的雷达型号,imu数据以及雷达正前方距离信息。

三、启动建图
1、启动代理,虚拟机终端输入:
xxxxxxxxxxsh ~/start_agent_computer.sh
2、启动建图指令虚拟机终端输入,等待一会出现建图画面。
xxxxxxxxxxros2 launch yahboomcar_nav map_gmapping_slam_launch.xml
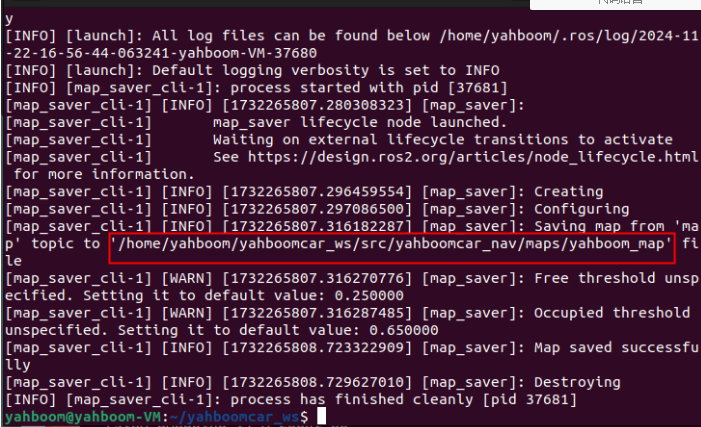
3、建完图之后,运行下面指令保存地图,保存到图中红框的位置。
xxxxxxxxxxros2 launch yahboomcar_nav save_map_launch.py