USB无线手柄遥控教程
1.USB无线手柄键位
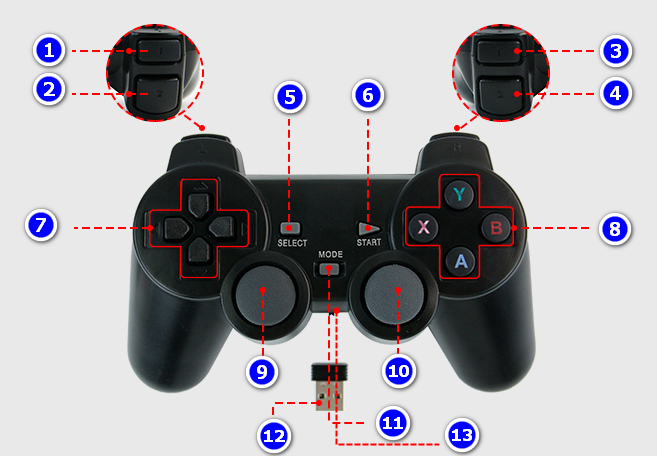
① L1:无功能
② L2:无功能
③ R1:无功能
④ R2:无功能
⑤ SELECT:无功能
⑥ START:蜂鸣器开关、唤醒USB无线手柄
⑦ 方向键:向上控制前进,向下控制后退,向左控制左平移,向右控制右平移。
⑧ 功能键:X控制左旋,B控制右旋,Y和A无功能
⑨ 左摇杆:向上控制前进,向下控制后退,向左控制左平移,向右控制右平移,按下摇杆控制速度。
⑩ 右摇杆:向左控制左旋,向右控制右旋,向上、向下和按下摇杆无功能。
⑪ MODE:连接某些电脑系统可弹出游戏菜单,长按可切换控制模式。
⑫ USB无线接收端子:连接主机的USB接口。
⑬ USB无线手柄电源开关:拨向ON为开,拨向OFF为关
2.连接USB无线手柄
2.1 安装USB无线手柄电池
请将USB无线手柄背面的电池盖打开,然后按照下图方式将两颗7号电池安装进电池仓,然后盖上电池盖。

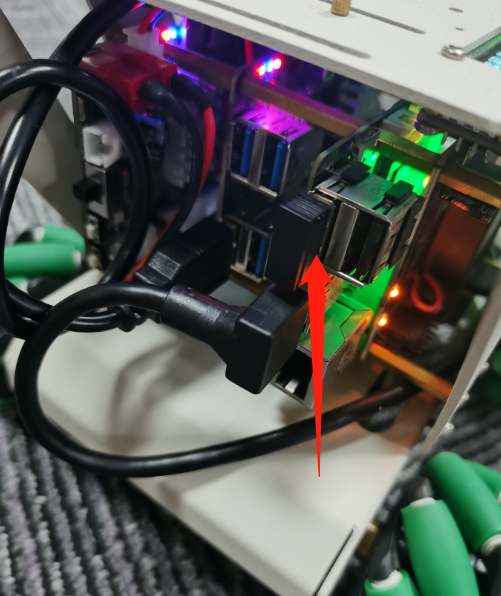
2.2 插入USB无线手柄接收器
下图为USB无线手柄的接收器:

请将USB无线手柄接收器插入到主板上的任一USB接口上,如下图所示。
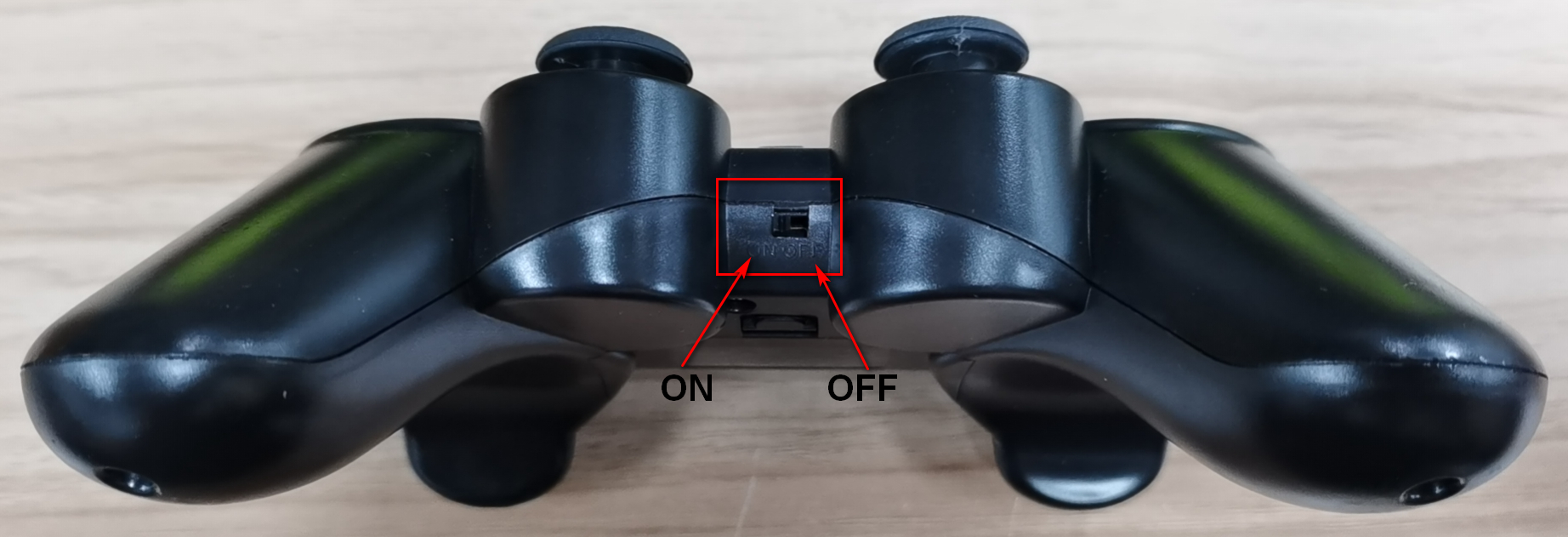
2.3 打开USB无线手柄的电源
请将USB无线手柄底部的电源开关拨到ON打开电源。如果长时间不使用请拨到OFF档节省电源。
2.4 启动机器人
打开RDK-X5-Robot的电源开关,等待RDK-X5-Robot机器人启动完成,启动过程大约需要1分钟,启动完毕后有蜂鸣器鸣笛提示。
连续短按USB无线手柄的【START】键,如果听到蜂鸣器鸣笛则表示连接成功。
USB无线手柄控制程序默认会随APP控制程序开机时自启动。
如果关闭了开机自启动的APP控制程序,也可以手动运行以下命令开启手柄控制程序。
xpython3 /home/sunrise/sunriseRobot/app_SunriseRobot/joystick.py
3.控制机器人
连接成功后则可以根据【USB无线手柄键位】的功能介绍,使用手柄来控制机器人。
USB无线手柄一段时间内未操作会自动进入休眠状态,此时可以按START键将手柄唤醒。
注意:
A:由于USB无线手柄连接USB接收器时需要对码确认,连接时请避免同时出现多个接收器的情况,否则可能会出现干扰,有可能连接上其他的接收器。
B:如果出现指示灯闪烁,表示手柄与接收器断开连接,请保持在10米内控制。