标定偏移量
由于出厂的机械臂上的舵机存在微小的误差,导致机械臂在夹取的时候,机械臂夹爪的落点会偏靠前/靠后,所以需要加上偏移量来补偿误差。
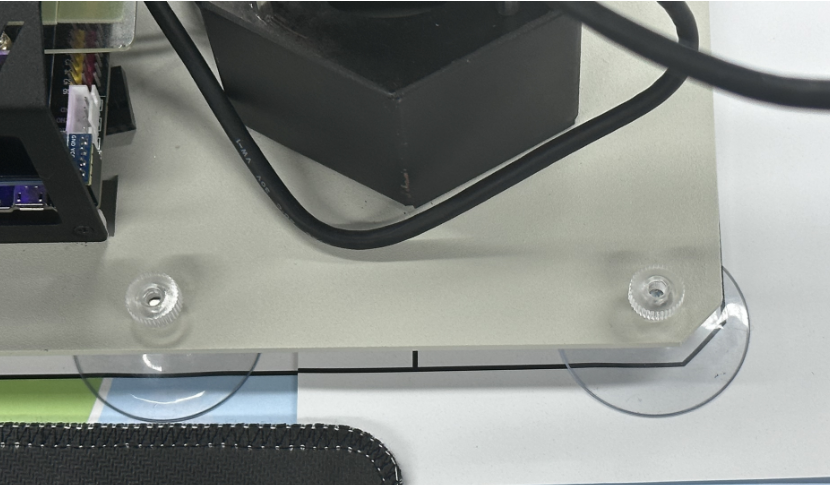
1、固定标定板
把我们提供的标定板固定在地图上,如下图所示,需要让机械臂底座在标定框内
2、运行程序
终端输入,
roslaunch orbbec_camera dabai_dcw2.launchrosrun dofbot_pro_info arm_driver.pyrosrun dofbot_pro_info kinemarics_dofbot_prorosrun dofbot_pro_apriltag calibrate_offset.pyrosrun dofbot_pro_apriltag apriltag_detect.py如下图所示,程序运行完,标定板上的机器码会出现在图像中,
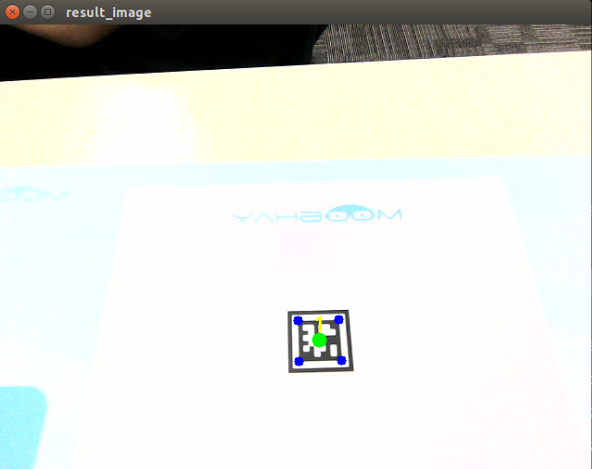
按下空格键,程序会计算标定板上的机器码在世界坐标系下的位置(xyz),然后与实际标定板上机器码相对应机械臂基座标系下的位置(0,0.181,-0.01)进行运算,并且把运算结果保存在偏移量参数文件内。偏移量参数文件的位置在/home/jetson/dofbot_pro_ws/src/dofbot_pro_info/param/offset_value.yaml,偏移量参数文件内容如下,
xxxxxxxxxxx_offset0.0y_offset0.01164z_offset-0.0092至此,标定程序结束,后续程序会自动加载偏移量参数文件内的值。