MicroROS虚拟机版:快速上手
MicroROS虚拟机版:快速上手一、烧录MicroROS控制板固件1、串口设备识别设备连接安装串口设备驱动查看设备2、烧录出厂固件出厂固件Flash下载工具3、烧录出厂固件打开Flash下载工具软件下载模式下载出厂固件验证出厂固件二、VMware安装和使用1、VMware安装VMware Workstation PlayerVMware Workstation Pro2、VMware使用三、配置MicroROS控制板1、参数介绍2、配置参数3、启动/连接代理启动代理连接代理4、测试查看ROS节点键盘控制小车四、APP建图导航1、APP建图启动并连接代理启动底层数据处理程序启动APP建图命令启动可视化建图地图保存的位置2、APP导航启动并连接代理启动底层数据处理程序启动APP导航命令
该教程只是简略版本,主要搭配快速上手视频!
详细的教程步骤可以看【开发前准备】教程!快速上手所涉及的软件位置:出厂固件:程序源码汇总虚拟机:虚拟机系统
一、烧录MicroROS控制板固件
注意:刚收到产品的用户,MicroROS控制板并不需要烧录出厂固件
xxxxxxxxxx我们的产品在出厂之前就会烧录好固件,这个视频主要提供给有烧录固件需求的用户!
1、串口设备识别
设备连接
使用Type-C数据线连接电脑和MicroROS控制板。
注意:烧录固件需要给MicroROS控制板打开电源开关进行供电!
xxxxxxxxxx首次连接MicroROS控制板,系统可能无法正确识别串口设备,我们需要安装CP210X系列的驱动程序
安装串口设备驱动
打开系统设备管理器;
如果设备管理器没有正确识别串口设备,我们需要安装CP210x系列驱动:
xxxxxxxxxxhttps://www.silabs.com/developers/usb-to-uart-bridge-vcp-drivers
查看设备
在设备管理器端口选项查看对应的串口设备。
2、烧录出厂固件
出厂固件
我们这里演示的固件:microROS_Robot_V0.0.4
xxxxxxxxxx后期固件可能会升级,名称可能略有不同,但步骤都是一样的
Flash下载工具
我们需要提前准备好Flash下载工具:
xxxxxxxxxxhttps://www.espressif.com.cn/zh-hans/support/download/other-tools
3、烧录出厂固件
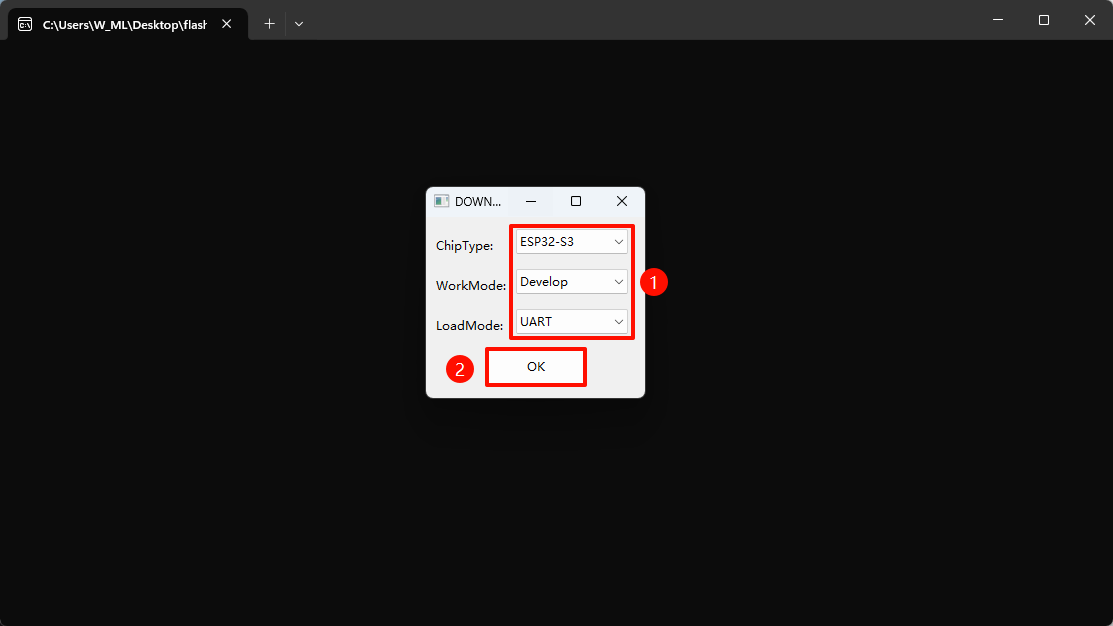
打开Flash下载工具
软件下载模式
勾选相应下载工具模式选项
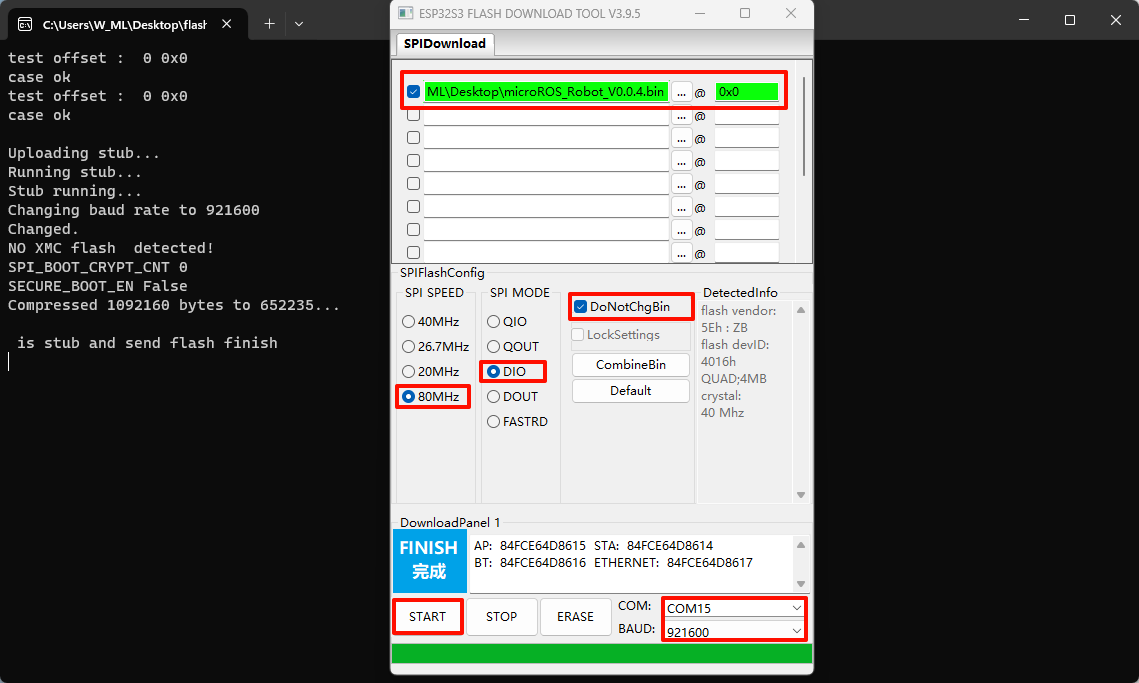
终端可以看到对应的下载信息!
下载出厂固件
验证出厂固件
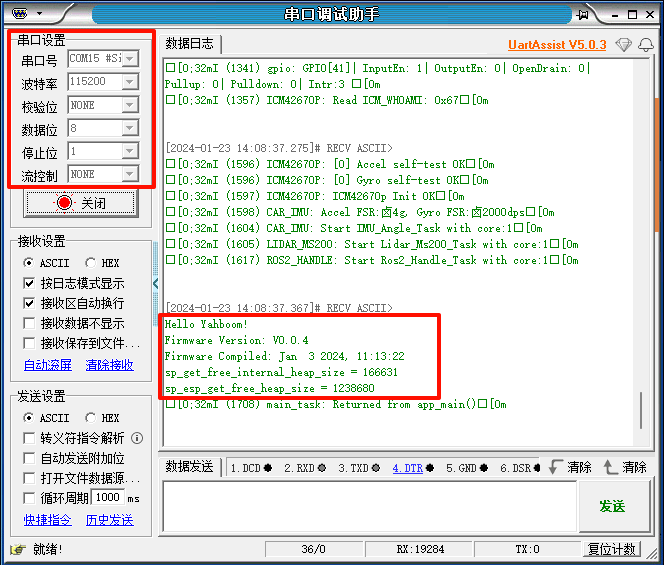
通过UartAssist软件查看MicroROS控制板打印的信息:连接串口后,按一下开发板的Reset按键!
xxxxxxxxxx串口会打印固件版本信息!
二、VMware安装和使用
1、VMware安装
VMware Workstation Player
该版本是非商用免费-目前无法从官网下载。
xxxxxxxxxxhttps://www.vmware.com/cn/products/workstation-player.html
VMware Workstation Pro
商用需要付费,非商用可以免费使用。
xxxxxxxxxxhttps://www.vmware.com/cn/products/workstation-pro/workstation-pro-evaluation.html
2、VMware使用
需要提前下载并解压我们资料里面提供的虚拟机镜像
x若打开虚拟机出现[FAILED]Failed to mount /mnt/hgfs等错误提示:需要启用共享文件夹具体操作:关闭虚拟机依次选择VMware Workstation菜单栏 → 虚拟机 → 设置 → 选项 → 共享文件夹 → 总是启用
三、配置MicroROS控制板
1、参数介绍
根据自己的配置编辑config_robot.py文件
xif __name__ == '__main__':robot = MicroROS_Robot(port='/dev/ttyUSB0', debug=False)robot.set_wifi_config("Yahboom2", "yahboom890729")robot.set_udp_config([192, 168, 2, 238], 8090)robot.set_car_type(robot.CAR_TYPE_COMPUTER)# robot.set_car_type(robot.CAR_TYPE_RPI5)robot.set_ros_domain_id(20)# robot.set_ros_serial_baudrate(921600)robot.set_ros_namespace("")
set_wifi_config:配置MicroROS控制板连接的网络信息
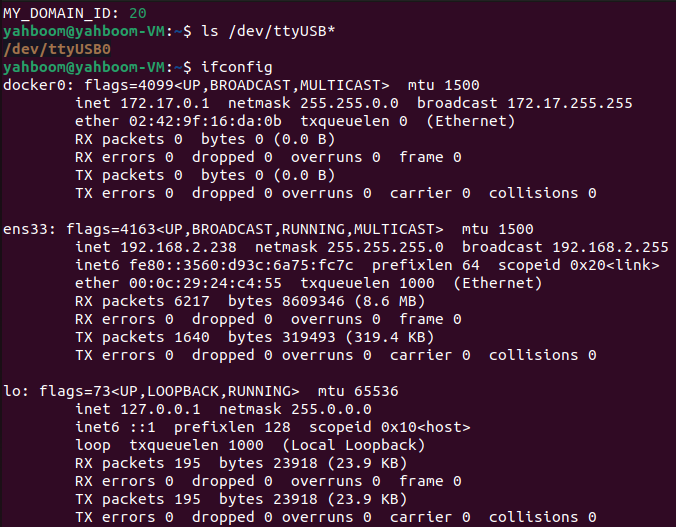
set_udp_config:虚拟机IP地址
set_car_type:设置小车类型(目前有虚拟机版和树莓派版)
set_ros_domain_id:设置ROS2通信域ID的环境变量
set_ros_serial_baudrate:设置ROS串口通讯的波特率
set_ros_namespace:设置多机通讯小车名称
2、配置参数
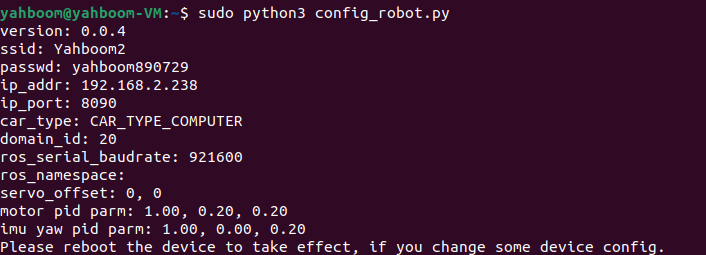
短按MicroROS控制板的复位键(复位5秒内属于配置状态),输入下面命令配置机器人,若终端返回的数据与自己设置的一致,则表示配置参数成功!
xxxxxxxxxxsudo python3 config_robot.py
配置成功后,可以将连接虚拟机和MicroROS控制板数据线拔掉!
3、启动/连接代理
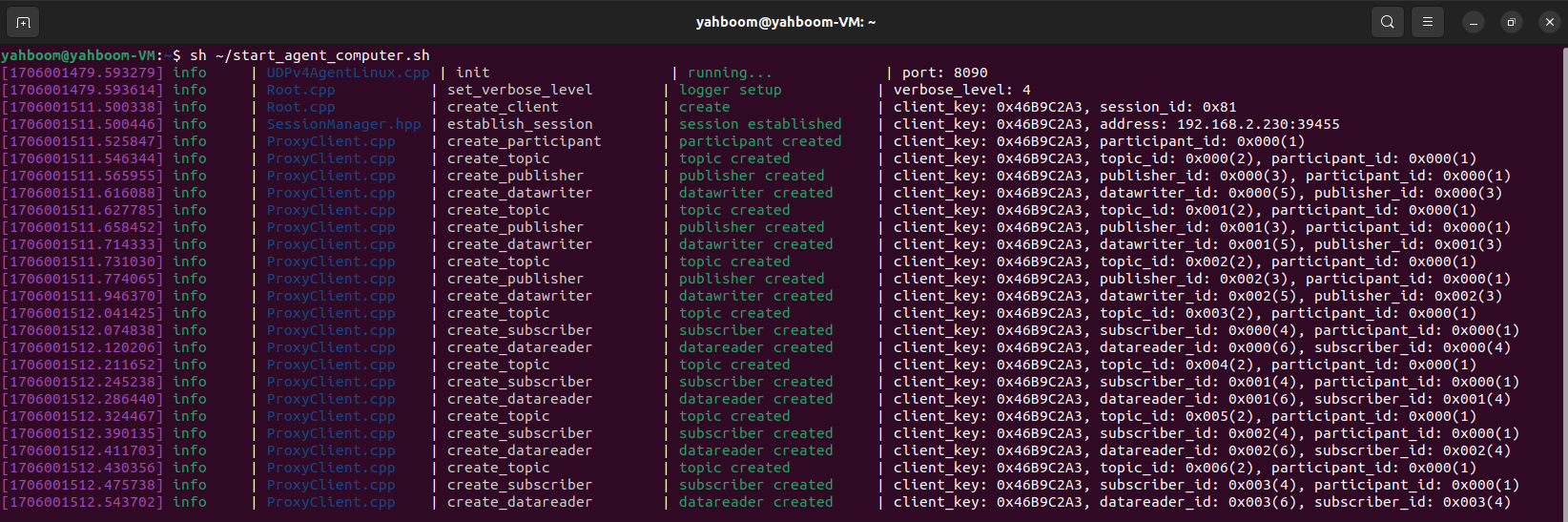
启动代理
使用我们资料中提供的虚拟机,运行下面命令:
xxxxxxxxxxsh ~/start_agent_computer.sh

连接代理
打开电源开关,小车会自动连接代理。
4、测试
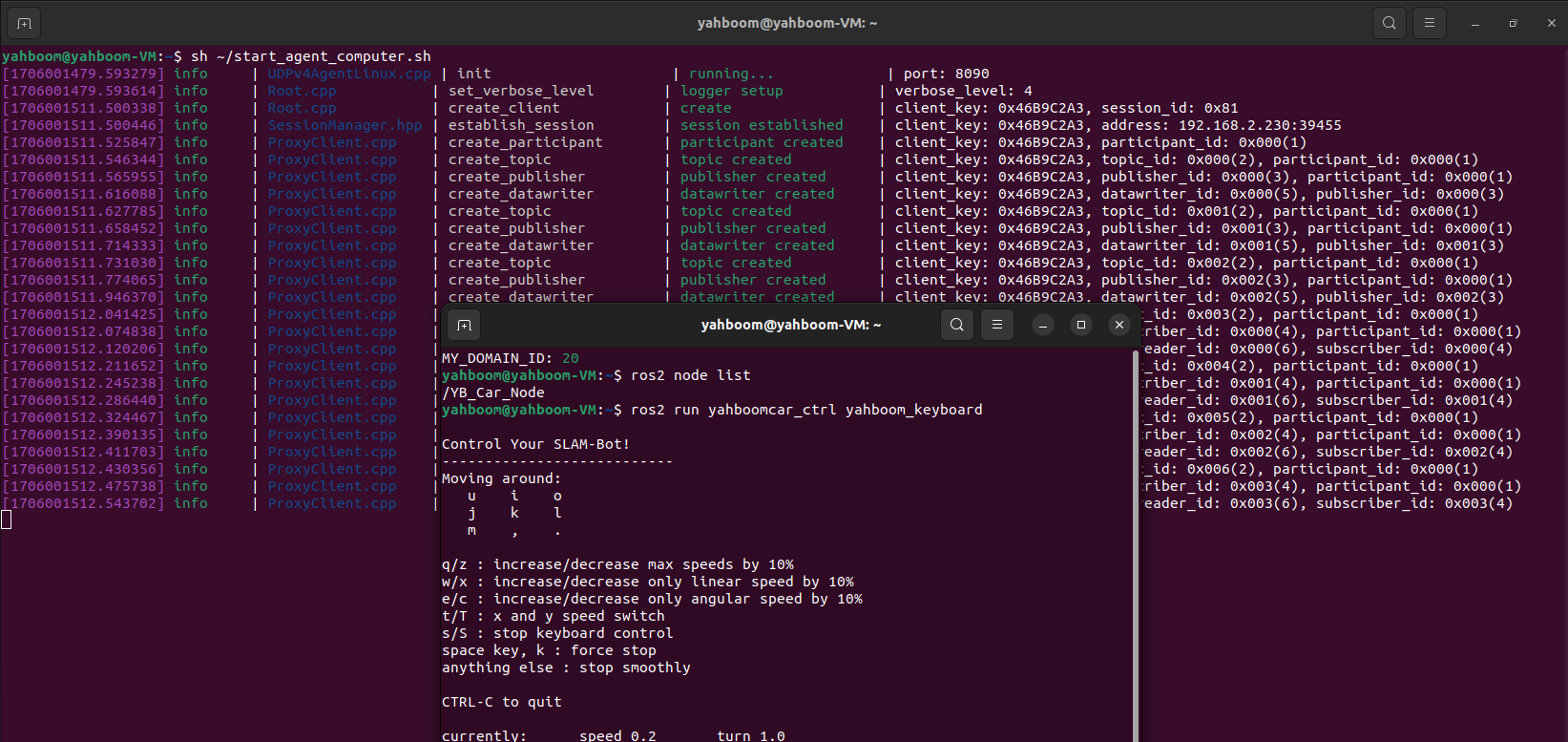
查看ROS节点
重新打开一个终端,输入下面命令:
xxxxxxxxxxros2 node list
键盘控制小车
在终端输入下面命令,并将鼠标停留在该终端:根据终端按键提示控制小车!
xxxxxxxxxxros2 run yahboomcar_ctrl yahboom_keyboard
四、APP建图导航
该案例需要虚拟机与小车处在同一个局域网下,且ROS_DOMAIN_ID一致!
xxxxxxxxxx我们需要提前安装好Yahboom ROS Robot应用!
1、APP建图
启动并连接代理
xxxxxxxxxxsh ~/start_agent_computer.sh
启动底层数据处理程序
xxxxxxxxxxros2 launch yahboomcar_bringup yahboomcar_bringup_launch.py
启动APP建图命令
xxxxxxxxxx#以下建图二选一ros2 launch yahboomcar_nav map_gmapping_app_launch.xmlros2 launch yahboomcar_nav map_cartographer_app_launch.xml
启动可视化建图
xxxxxxxxxxros2 launch yahboomcar_nav display_launch.py
地图保存的位置
xxxxxxxxxx/home/yahboom/yahboomcar_ws/src/yahboomcar_nav/maps
2、APP导航
启动并连接代理
xxxxxxxxxxsh ~/start_agent_computer.sh
启动底层数据处理程序
xxxxxxxxxxros2 launch yahboomcar_bringup yahboomcar_bringup_launch.py
启动APP导航命令
xxxxxxxxxxros2 launch yahboomcar_nav navigation_dwb_app_launch.xml maps:=/home/yahboom/yahboomcar_ws/src/yahboomcar_nav/maps/APPTest.yaml