舵机云台安装注意事项
舵机云台不朝前不对正时,
需要进行以下的校准操作,
(1)先将小车断电
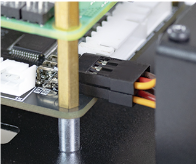
(2)舵机连线保持连接,先将舵机云台拆卸,上下两个舵机都要拆卸下来
(2)将raspbotv2小车重开电源,即重启系统
(3)确认小车进入系统后,自启程序会初始化舵机的角度,等到舵机转动后,
注意:通电之后,舵机有扭矩,不要再次转动舵机的角度!
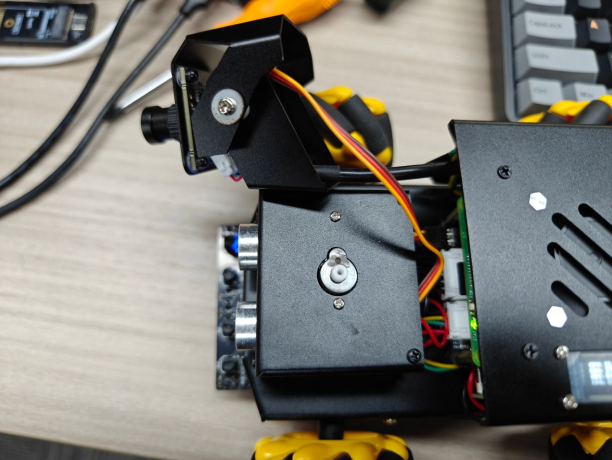
(4)先安装垂直舵机(上舵机),再安装水平舵机(下舵机),安装完毕后,舵机是这个状态即可
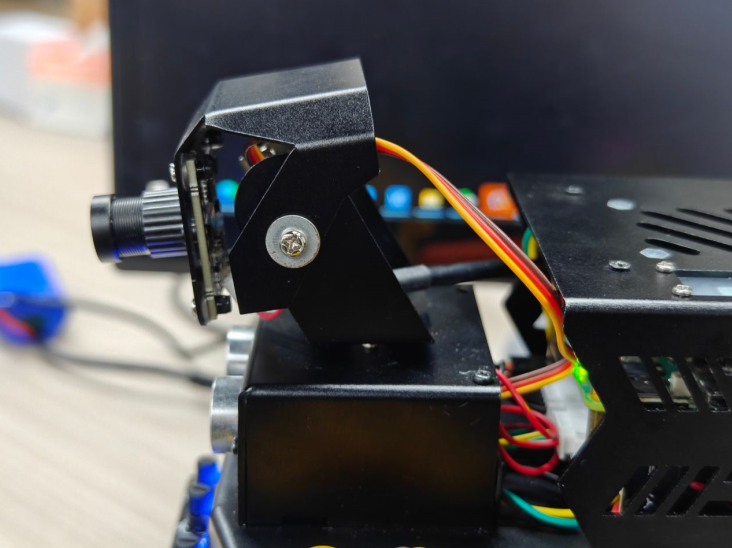

注:水平舵机因为结构问题会相差一个齿轮的位置差,舵机不完全正直朝前是正常现象,
如果偏差太大,可以通过修改此程序去调节初始化舵机角度

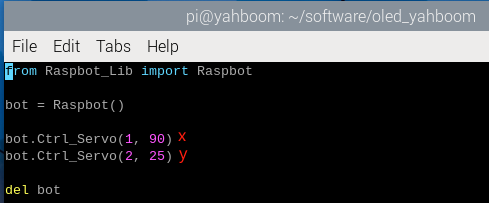
#舵机角度1,x轴 0~180 度2,y轴 0~110 度树莓派每次开机会自启此程序,