上手试玩
准备工作
检查确认USB设备连接无误后,核对主板和机械臂的电源适配器接口,然后分别插入主板和机械臂的电源接口,等待机械臂系统启动,大约需要1分钟,系统启动后,机械臂会初始化并直立起来。
APP遥控
下载APP
如果是安卓用户,请前往[Google Play Store]搜索mycobot下载APP。或者扫描下方二维码下载APP文件。IOS用户暂不支持。

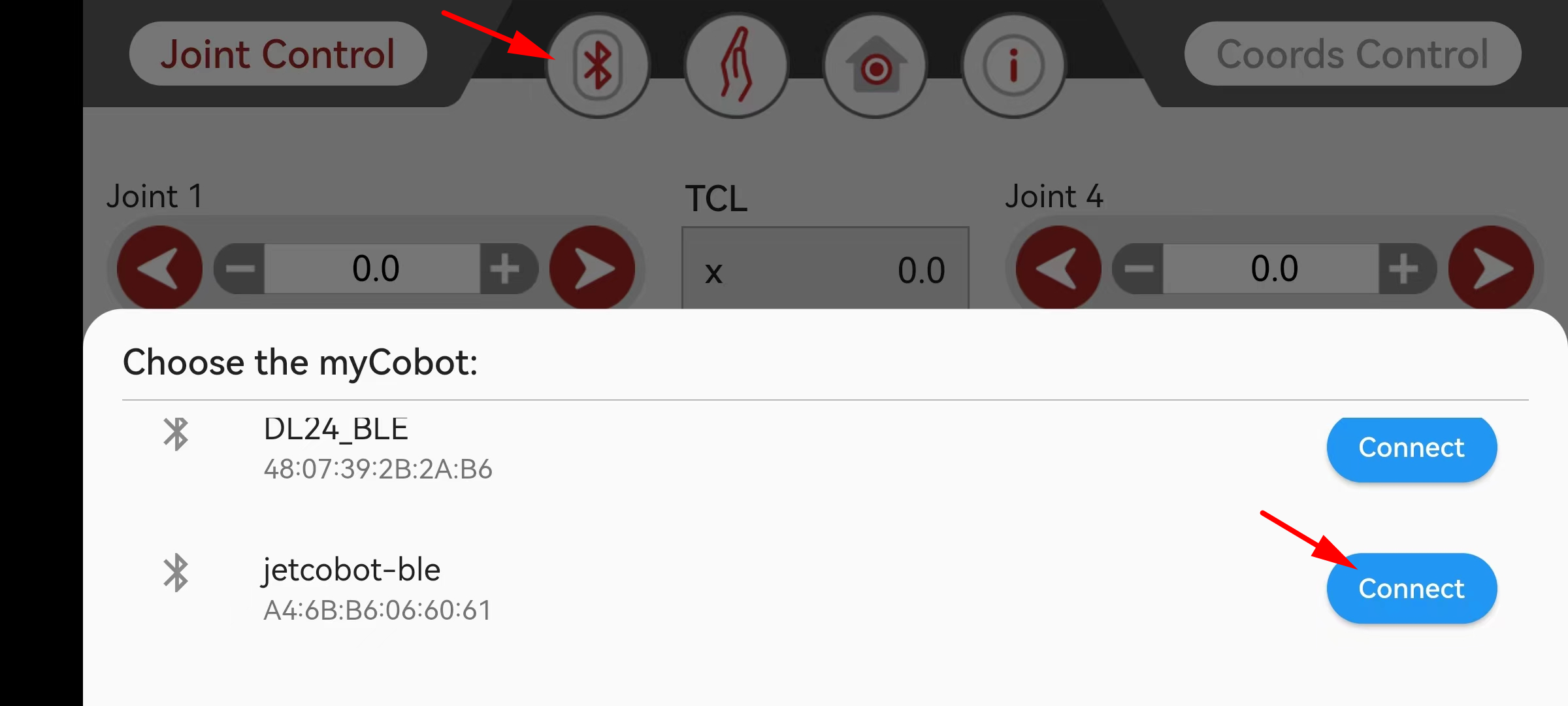
蓝牙连接界面
点击中间的蓝牙图标,然后选择蓝牙设备名称【jetcobot-ble】,点击【Connect】。
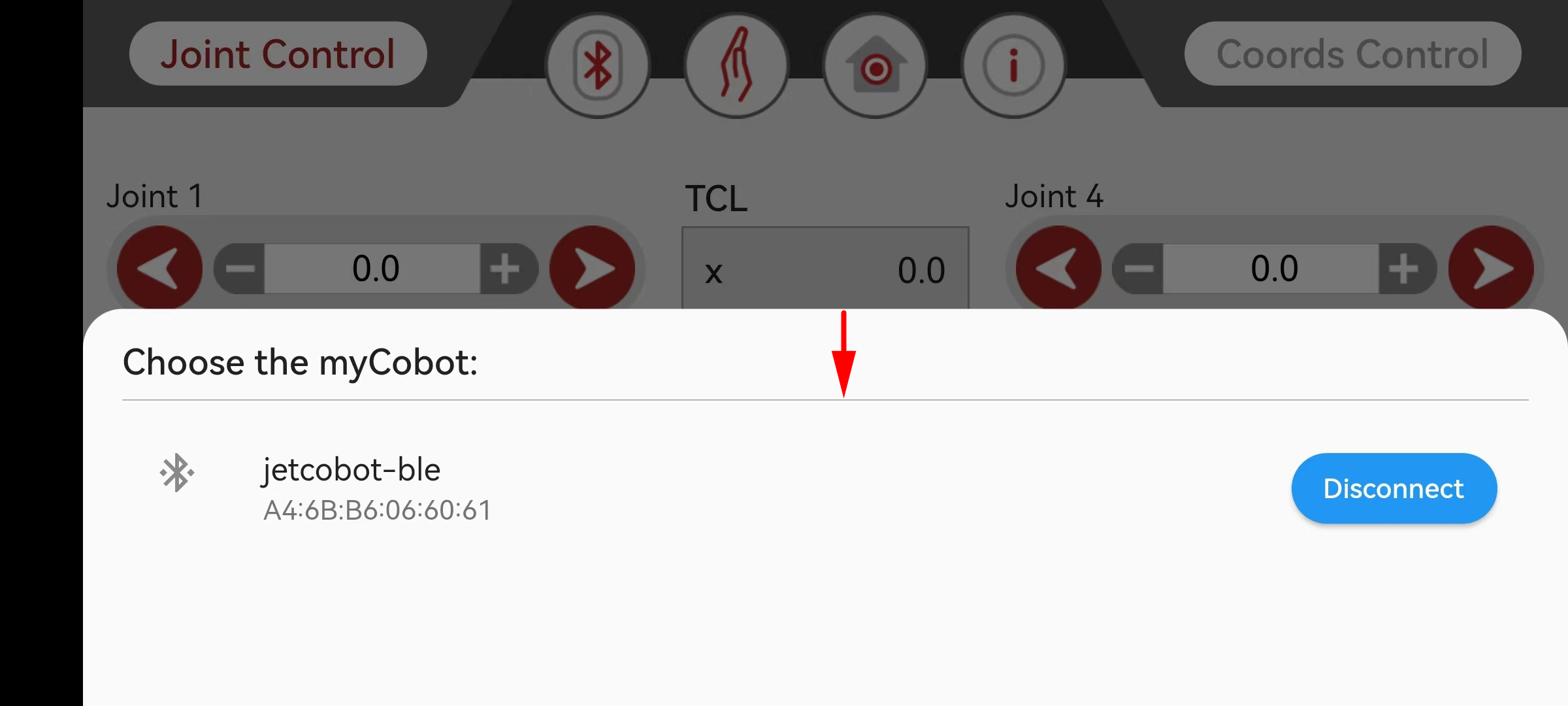
连接成功后,状态会变成【Disconnect】。下滑蓝牙界面返回控制控制界面。
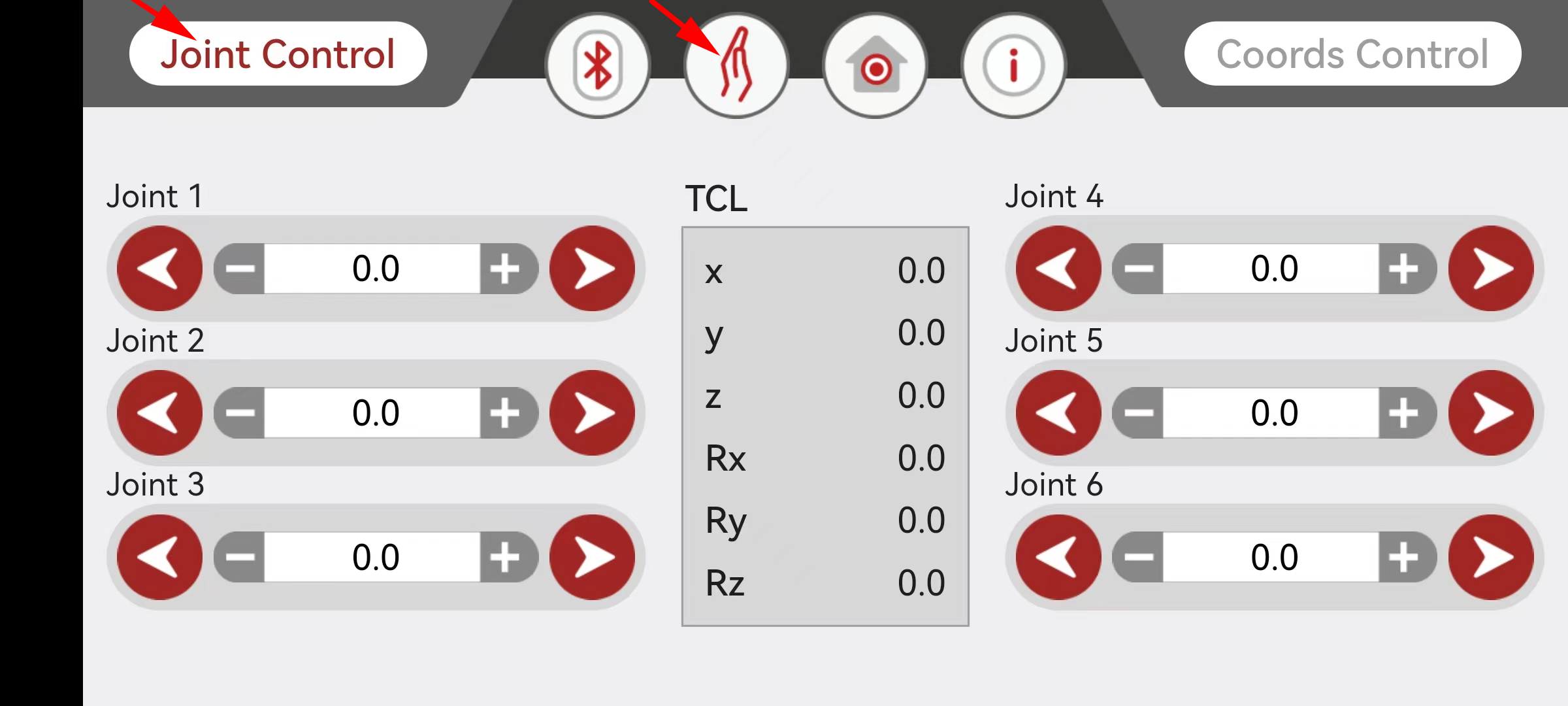
使能机械臂控制功能
点击左上角的【Joint Control】切换到舵机控制模式,然后点击中间第二个图标,使能机械臂控制功能。
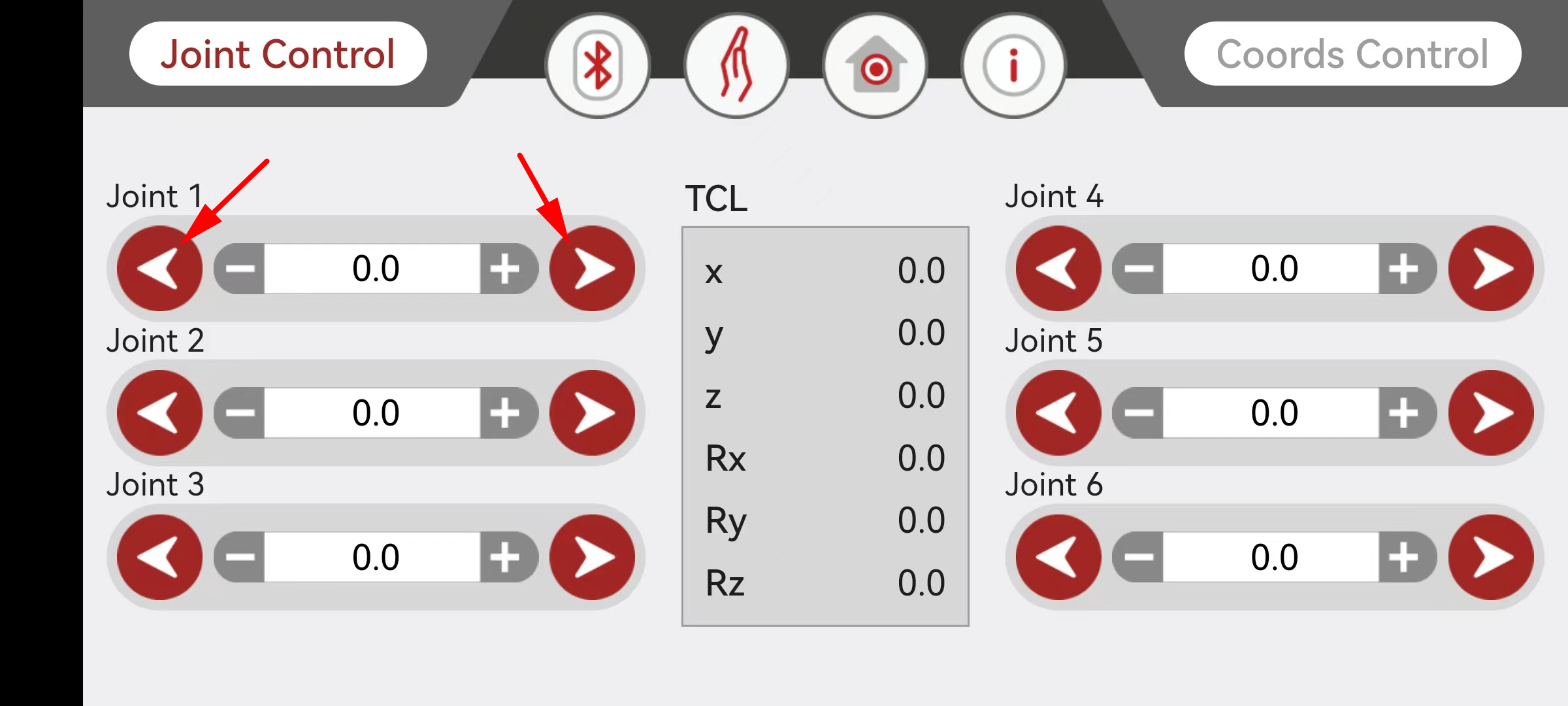
控制机械臂
Joint1~6代表机械臂自下而上的六个自由度关节,可控制某个关节到达对应角度。短按控制一次,长按可连续控制。
手柄遥控
确认USB无线手柄接收器在开机前已经插入到主板的USB口。
安装无线手柄的电池,将无线手柄的电源开关拨到【ON】。

按一下【START】键激活手柄。
此时可以开始控制机械臂。按键功能如下图所示:

①:上下控制关节2,左右控制关节1。
②:上下控制关节3,左右无功能。
③:上下控制关节4,左右控制关节5。
④:Y A控制关节7(夹爪),X B控制关节6。
⑤:L1控制机械臂速度增加,L2控制机械臂速度减少。
⑥:R1控制夹爪立即夹紧,R2控制夹爪立即松开。
⑦:【SELECT】按钮控制机械臂关节角度恢复初始位置。
【START】激活手柄。
【MODE】模式切换,请勿按此按键。
注:当无线手柄闲置几分钟后,会自动进入休眠状态,此时需要按一下【START】键激活手柄,才可以控制机械臂。
关闭APP服务
APP和手柄上手试玩服务在出厂镜像默认开机自启动,在实际开发中可能会造成干扰,所以如果不需要开机自动开启APP和手柄控制服务,请输入以下命令。
临时关闭APP服务
sudo systemctl stop yahboom_app.service
永久关闭APP服务
xxxxxxxxxxsudo systemctl disable yahboom_app.service
查询APP服务状态
xxxxxxxxxxsudo systemctl status yahboom_app.service
重新开启服务
如果在上一步永久关闭了APP服务,之后想打开APP服务,或者恢复APP服务开机自启动功能,请输入以下命令。
临时开启APP服务
xxxxxxxxxxsudo systemctl start yahboom_app.service
设置APP服务开机自启动
xxxxxxxxxxsudo systemctl enable yahboom_app.service