遥控小车
遥控小车1、下载YahboomCam2、组装小车3、搭建开发环境下载Arduino IDE安装Arduino IDE4、上传程序设备连接软件连接上传程序5、程序启动6、模式选择7、APP遥控小车APP连接APP控制8、红外遥控小车红外控制
1、下载YahboomCam
Android/IOS手机用户扫描二维码下载遥控软件
IOS用户也可以在苹果应用商店搜索并下载【YahboomCam】

2、组装小车
按照组装视频,检查小车所有硬件连接是否正确。
3、搭建开发环境
开发环境所用软件位于产品资料的【软件资源:软件工具】文件夹下。
下载Arduino IDE
解压并以管理员身份打开我们资料提供的Arduino IDE安装包。
安装Arduino IDE
建议按照下面选项勾选和安装。
同意协议
安装选项
安装位置
完成安装
首次使用Arduino IDE会自动进行初始化,需要同意软件自动弹出的驱动安装和等待必备软件库安装完成!
4、上传程序
我们的小车出厂是没有程序的,需要用户自己上传程序。
xxxxxxxxxx注意:上传程序前需要断开WiFi摄像头和小车拓展板的硬件连接。
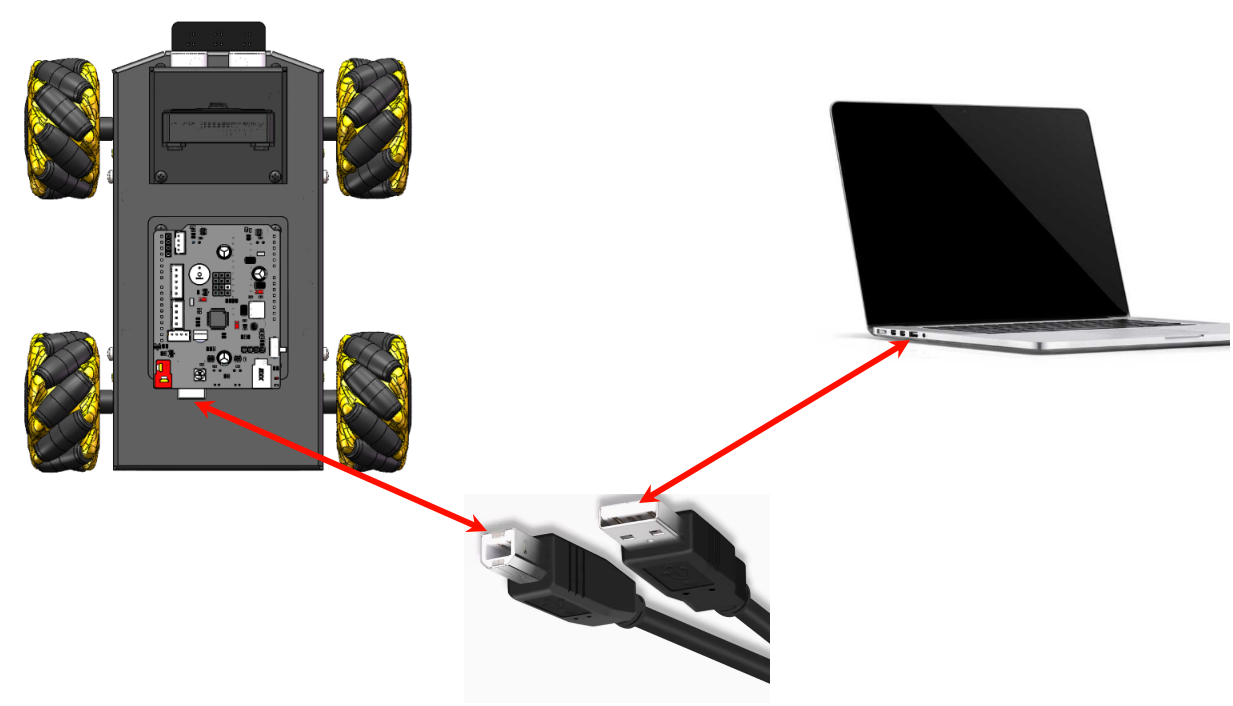
设备连接
Arduino Uno在拓展板的下方,连接电脑前需要断开WiFi摄像头和拓展板的连接;然后使用Type-B数据线连接Arduino Uno和电脑。
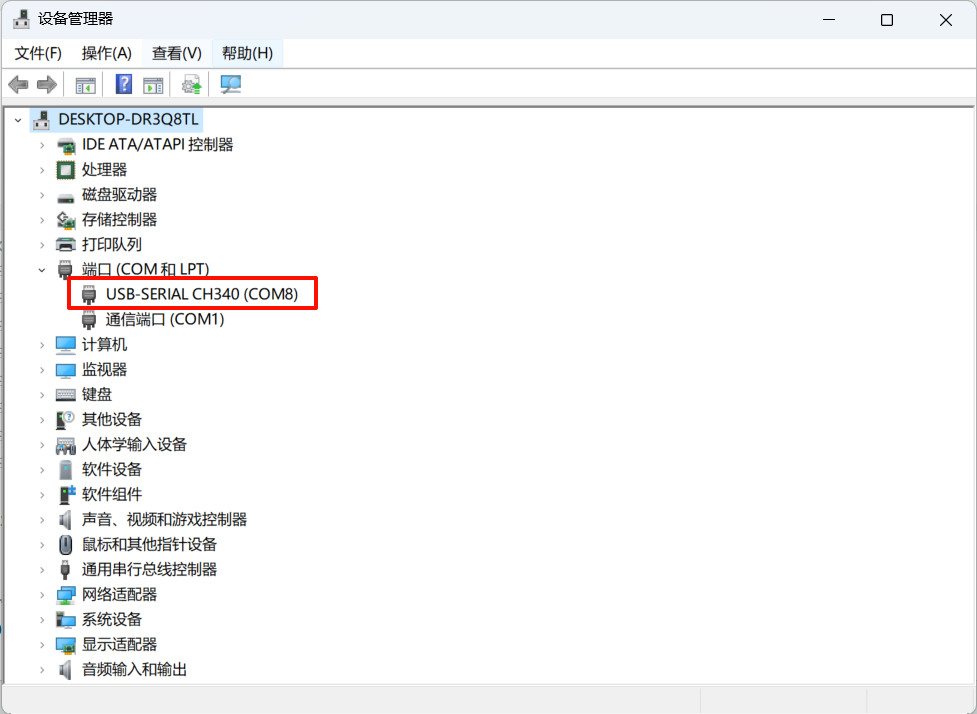
查看串口号
打开系统自带的设备管理器,查看端口选项里面带有CH340字符的串口设备,目前系统检测Arduino Uno开发板的端口号是COM8;
若系统没有检测到对应串口设备,可以按照教程安装串口驱动。
软件连接
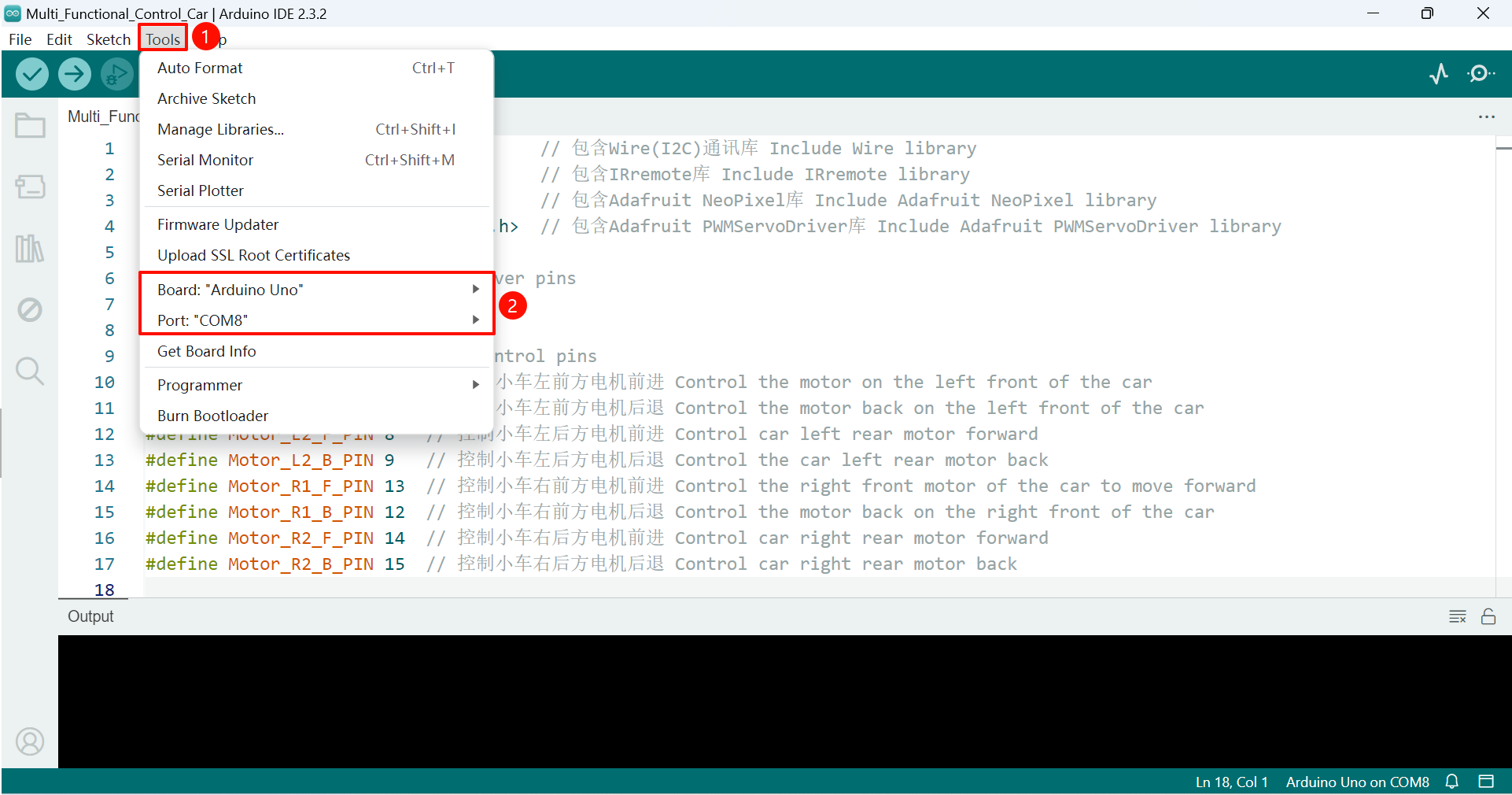
下载并打开Multi_Functional_Control_Car.ino文件:选择开发板对应的型号和串口号。
xxxxxxxxxxMulti_Functional_Control_Car.ino文件位于【软件资源:小车代码】文件夹下
开发板选择:点击Tools → Board → Arduino AVR Boards → Arduino Uno
串口号选择:点击Tools → Port → COM8
xxxxxxxxxx请根据自己系统识别的串口号选择串口设备
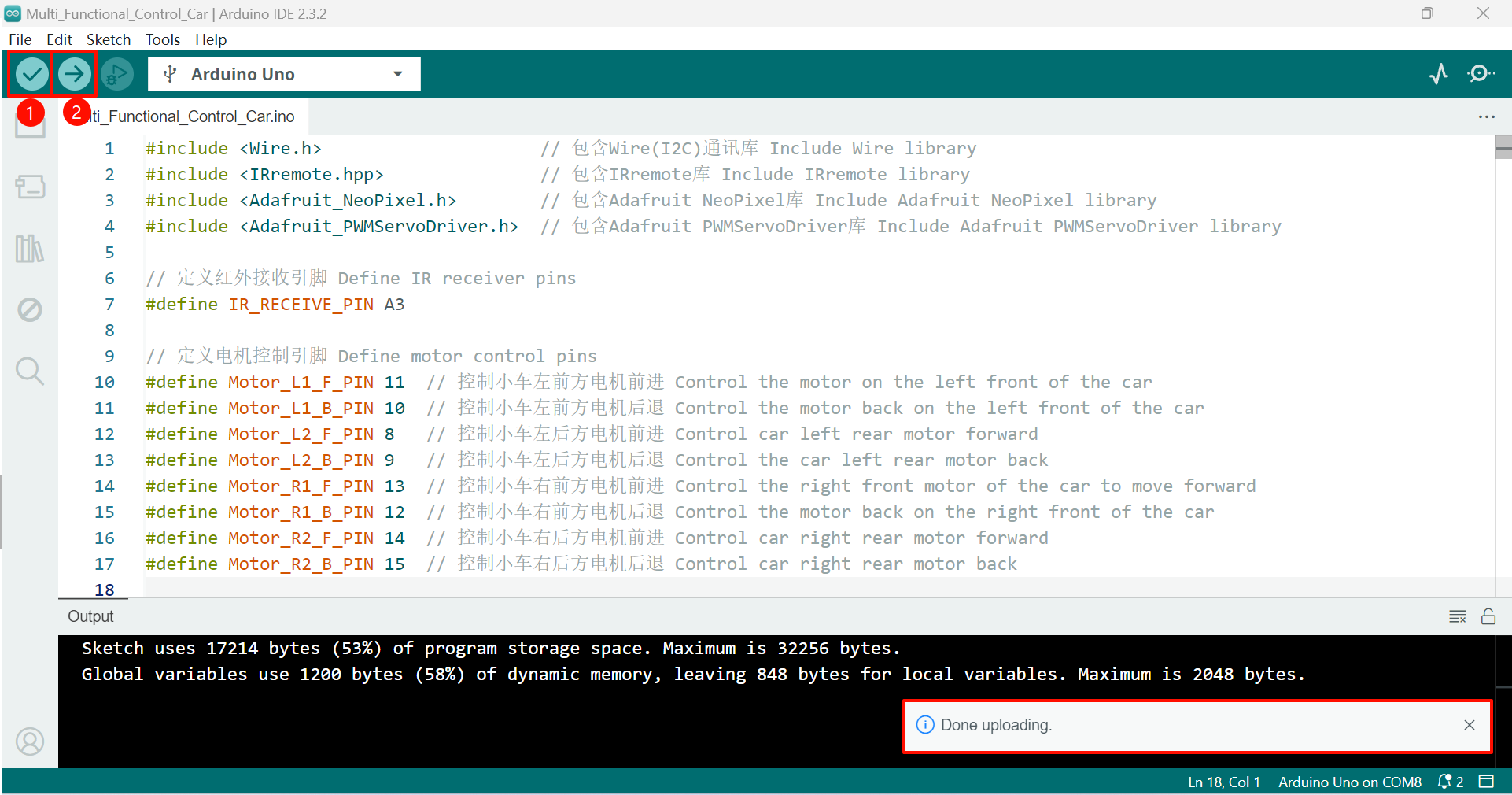
上传程序
完成第三方库导入后:先编译后上传程序。
xxxxxxxxxx上传程序前需要安装一些第三方库,可以按照我们产品资料的【环境搭建:使用第三方库】教程导入第三方库
编译(Verify)选项:点击① → 编译成功,Arduino IDE右下角会出现编译完成(Done compiling)弹窗!
上传(Upload)选项:点击② → 上传成功,Arduino IDE右下角会出现上传完成(Done uploading)弹窗!
5、程序启动
程序上传成功后,关闭小车电源,安装WiFi摄像头和拓展板的连接,然后再打开小车电源。
6、模式选择
程序启动后,小车拓展板上的RGB灯会显示白色,代表进入遥控功能模式选择阶段。
模式切换:按小车拓展板上的K1按键可以切换两种遥控模式,切换模式时间大概5秒,一旦RGB不显示颜色,说明功能切换模式结束,保留最后选择的遥控模式。
RGB灯显示白色:WiFi遥控小车模式
RGB灯显示红色:红外遥控小车模式
xxxxxxxxxx若要重新切换遥控模式,可以按开发板上的Reset按键重启程序!
7、APP遥控小车
小车功能模式需要选择WiFi遥控小车模式:程序启动后初始设置为WiFi遥控模式,请等待5秒再进行遥控操作。
APP连接
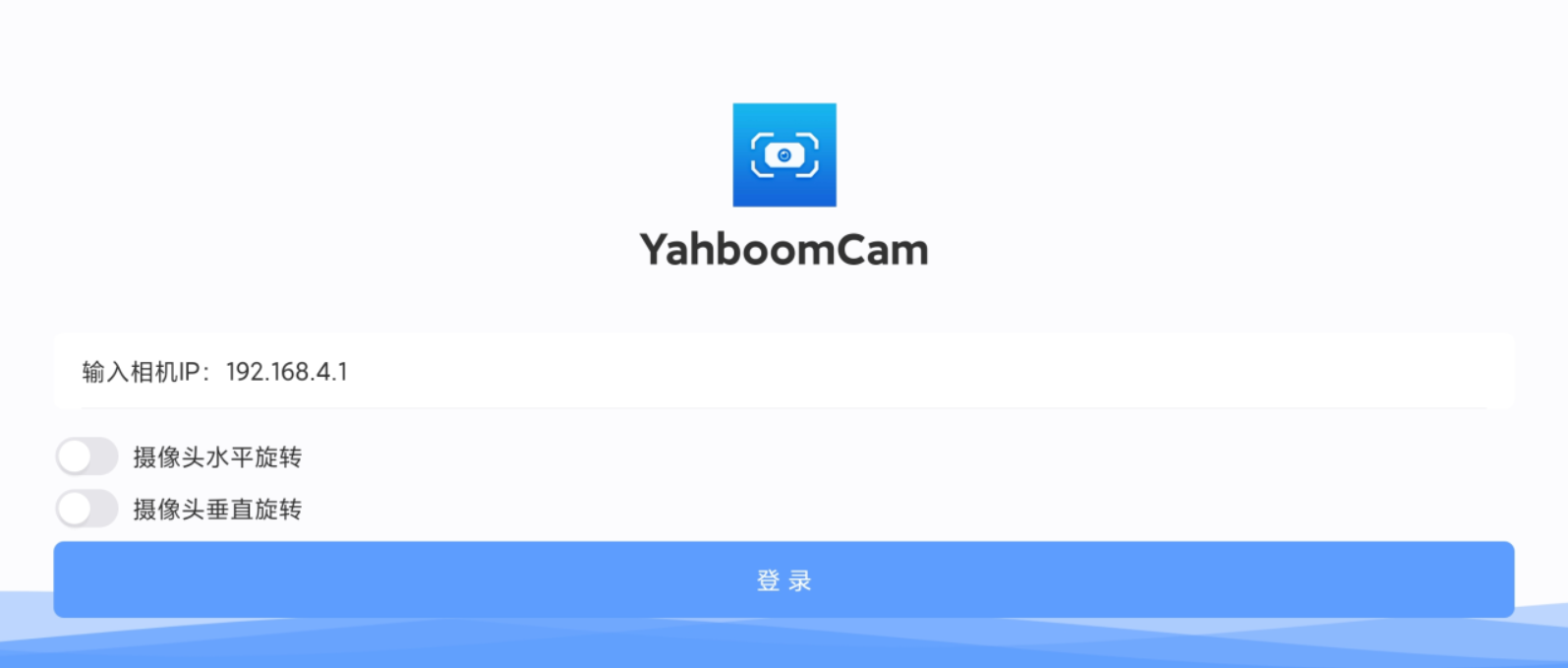
手机连接WiFi摄像头自带的热点(自带热点名称:Yahboom_ESP32_WIFI),然后打开YahboomCam软件。
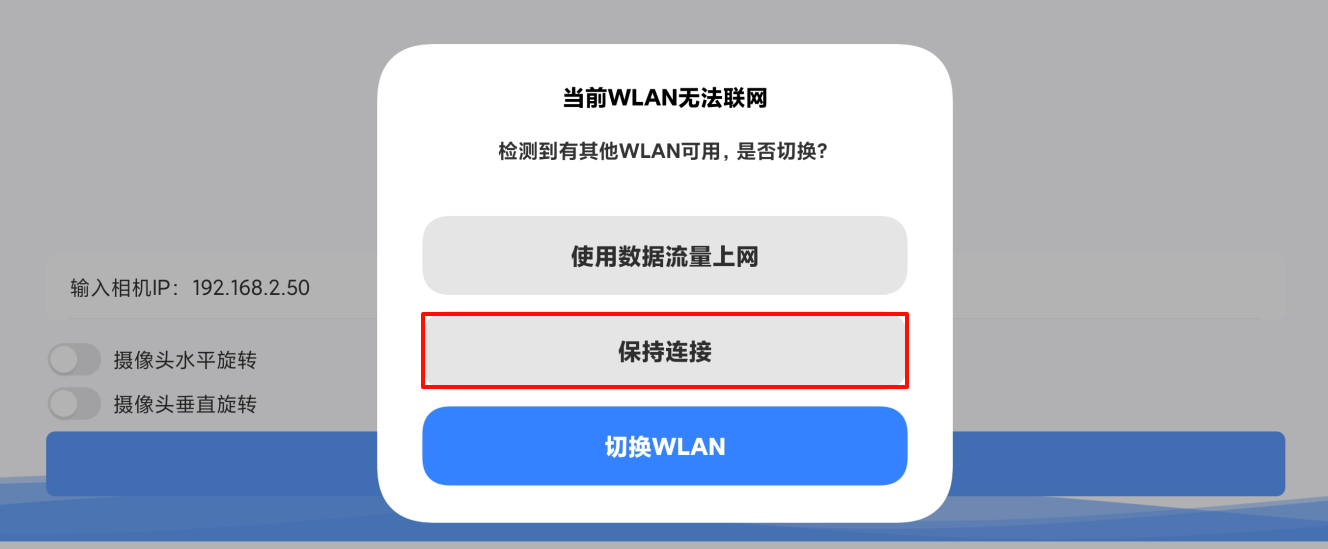
xxxxxxxxxx部分手机对于连接无网络的热点会出现提示,我们需要点击保持连接!
在YahboomCam软件内输入IP:192.168.4.1,然后点击登录,进入APP控制界面。
xxxxxxxxxxWiFi摄像头自带热点的IP是192.168.4.1
APP控制
进入APP界面后,APP会显示摄像头画面。
xxxxxxxxxx若没有显示画面,检查手机是否正常连接WiFi摄像头热点

左边按钮
控制小车运动状态:上(前进)、下(后退)、左(左移)、右(右移)、停(停止)、左旋、右旋
右边按钮
控制舵机旋转角度:左(向左旋转)、右(向右旋转)、上(向上旋转)、下(向下旋转)
注意:
画面问题:由于我们的小车上的WiFi摄像头安装问题,我们需要勾选摄像头水平翻转和垂直旋转,这样显示的画面就会正常!
舵机控制问题:我们的小车只搭配一个舵机,所以只能通过舵机的左和右控制,旋转的范围控制在小车前方[35°,145°]。
xxxxxxxxxx小车程序上对APP发送的舵机旋转角度进行限位,控制旋转范围是[35°,145°],这样是避免WiFi摄像头和小车拓展板发生碰撞或者挤压。
8、红外遥控小车
小车功能模式需要选择红外遥控小车模式:程序启动后请在5秒内按下K1按键,当拓展板RGB灯由白色变为红色,则表示模式切换为红外遥控。
红外控制
使用红外遥控器对准小车拓展板上的红外接收头进行按键控制,APP只对部分按键进行功能设置。
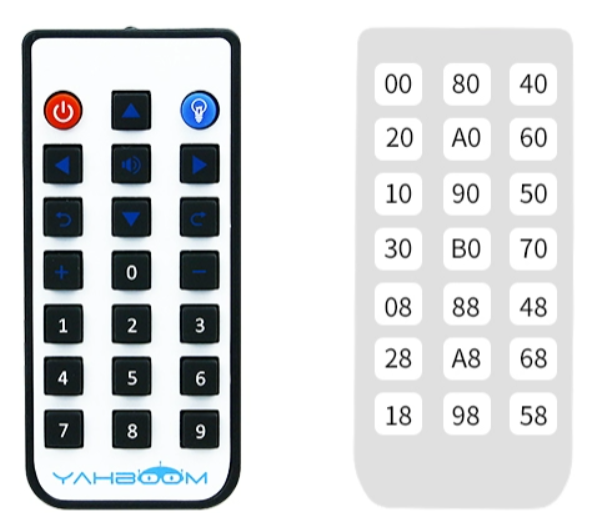
| 红外遥控器 | 解析数据 | 功能 |
|---|---|---|
| Power | 0x00 | 停止所有外设功能 |
| RGB | 0x40 | 切换RGB颜色 |
| Buzzer | 0xA0 | 控制蜂鸣器发声 |
| Car Forward | 0x80 | 小车前进 |
| Car Backward | 0x90 | 小车后退 |
| Car Left | 0x20 | 小车向左平移 |
| Car Right | 0x60 | 小车向右平移 |
| Car Left Spin | 0x10 | 小车原地左旋 |
| Car Right Spin | 0x50 | 小车原地右旋 |
| Add | 0x30 | 速度增加 |
| Sub | 0x70 | 速度减小 |
红外遥控器控制小车运动状态,需要长按才会进行相应的控制:比如长按小车前进,松开小车停止。
为了避免红外光对传感器产生干扰,我们需要在室内使用红外遥控功能