microROS控制板简介
microROS控制板是一款轻量级的ROS2驱动控制器,也是一款ESP32S3双核开发板。板载集成了ESP32S3核心模组控制单元、电机驱动、舵机驱动、六轴IMU姿态传感器等重要外设,支持WiFi、蓝牙、串口等通讯功能,支持四路编码器电机、两路PWM舵机、一路激光雷达以及一路为树莓派5供电的PD电源,出厂自带外设驱动固件程序,用户可直接接入ROS2环境使用,操作便利,使用简单又高效。
板载资源说明
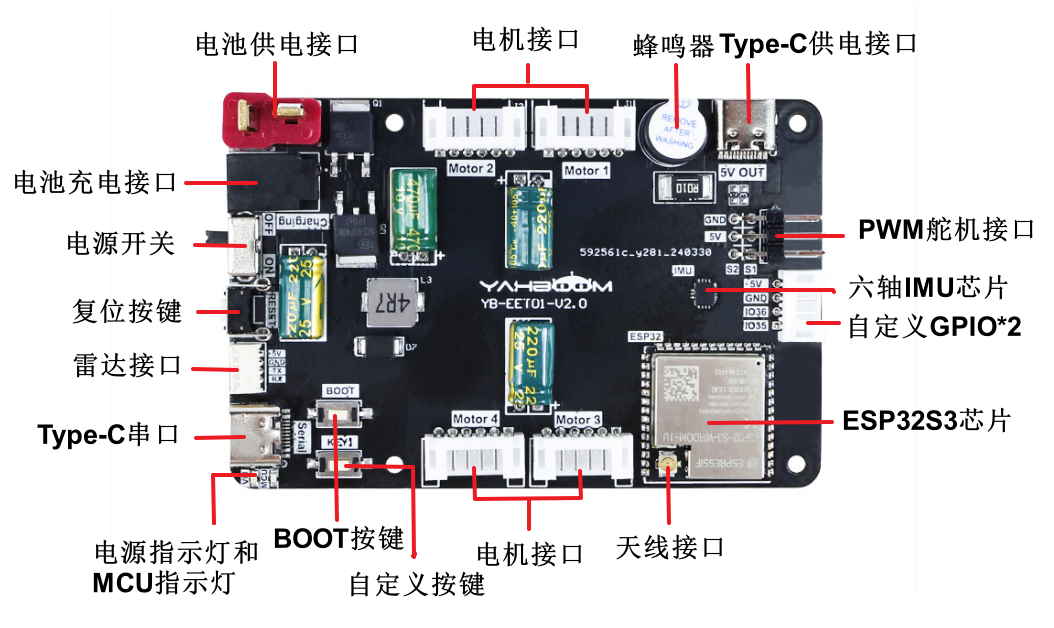
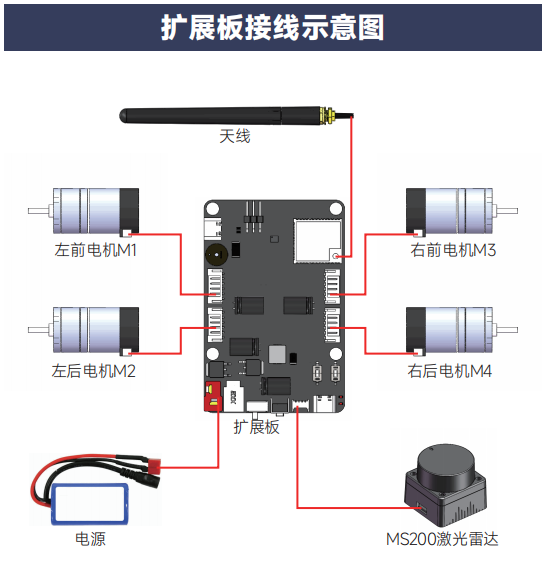
电池供电接口:连接7.4V电池(T型接口),为机器人供电。
电池充电接口:连接DC8.4V充电器给机器人充电。
电源开关:机器人电源总开关。
复位按键:ESP32S3控制芯片的复位按钮。
雷达接口:连接MS200激光雷达。
Type-C串口:用于烧录固件、配置参数、串口通讯等功能。
电源指示灯和MCU指示灯:指示产品当前状态。
BOOT按键:ESP32S3控制芯片的BOOT按键,也可以用到自定义按键用。
自定义按键:ESP32S3控制芯片的GPIO,可编程自定义功能。
电机接口:连接310编码器电机。
天线接口:连接外置天线。
ESP32S3控制芯片:microROS控制板的主要控制芯片,负责管理板载上的所有外设功能。
自定义GPIO:可编程自定义功能。
六轴IMU芯片:提供机器人当前的姿态信息。
PWM舵机接口:用于连接两路PWM舵机。
Type-C供电接口:连接树莓派5的Type-C接口,为树莓派5供电。
蜂鸣器:有源蜂鸣器,用于低电压报警提示。

D1和D2:自定义指示灯。
GPIO引脚分配
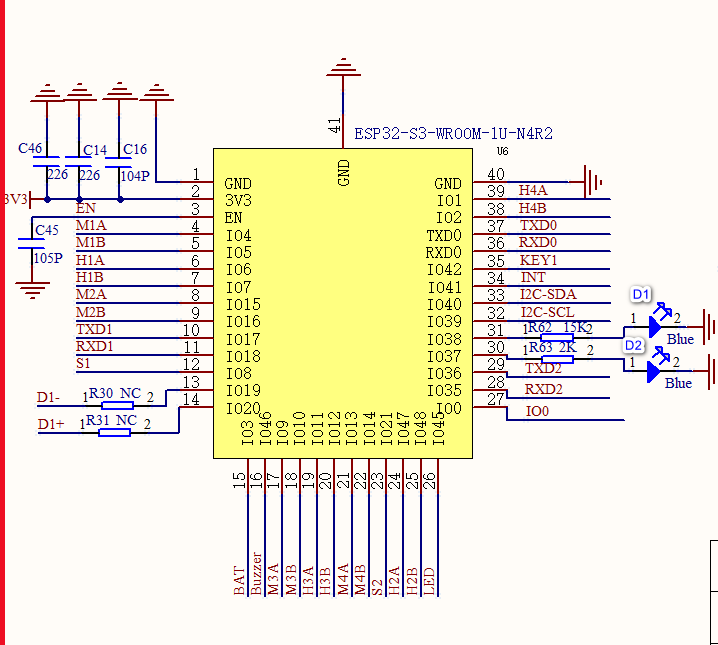
| 外设名称 | ESP32-S3-GPIO |
|---|---|
| 电机M1-PWM-M1A | GPIO4 |
| 电机M1-PWM-M1B | GPIO5 |
| 电机M1-编码器-H1A | GPIO6 |
| 电机M1-编码器-H1B | GPIO7 |
| 电机M2-PWM-M2A | GPIO15 |
| 电机M2-PWM-M2B | GPIO16 |
| 电机M2-编码器-H2A | GPIO47 |
| 电机M2-编码器-H2B | GPIO48 |
| 电机M3-PWM-M3A | GPIO9 |
| 电机M3-PWM-M3B | GPIO10 |
| 电机M3-编码器-H3A | GPIO11 |
| 电机M3-编码器-H3B | GPIO12 |
| 电机M4-PWM-M4A | GPIO13 |
| 电机M4-PWM-M4B | GPIO14 |
| 电机M4-编码器-H4A | GPIO1 |
| 电机M4-编码器-H4B | GPIO2 |
| BOOT按键-IO0 | GPIO0 |
| 自定义按键-KEY1 | GPIO42 |
| 电池电压检测-BAT | GPIO3 |
| MCU指示灯-LED | GPIO45 |
| 蜂鸣器-Buzzer | GPIO46 |
| 舵机接口-S1 | GPIO8 |
| 舵机接口-S2 | GPIO21 |
| IMU中断-INT | GPIO41 |
| IMU-I2C-SCL | GPIO39 |
| IMU-I2C-SDA | GPIO40 |
| 雷达RX-串口1-TXD1 | GPIO17 |
| 雷达TX-串口1-RXD1 | GPIO18 |
| TypeC烧录串口RX-TXD0 | GPIO43 |
| TypeC烧录串口TX-RXD0 | GPIO44 |
| 自定义GPIO | GPIO35 |
| 自定义GPIO | GPIO36 |
| 自定义指示灯 | D1 |
| 自定义指示灯 | D2 |
扩展板接线示意图