DO_MAIN_ID配置
本教程主要适用于多机通讯,也就是小车和其他主板或者虚拟机之间的互相通信,只要和对应主机设置成一样的ID即可,下面主要介绍怎么设置小车的ID。
1、修改config_robot.py文件
RISC-V小车成功开机后,需要临时关闭掉自启动程序防止冲突(详情查看《0.开机自启动和临时关闭》),打开终端输入以下指令打开配置文件,
sudo gedit config_robot.py
会出现下面的界面,我们拉到最后
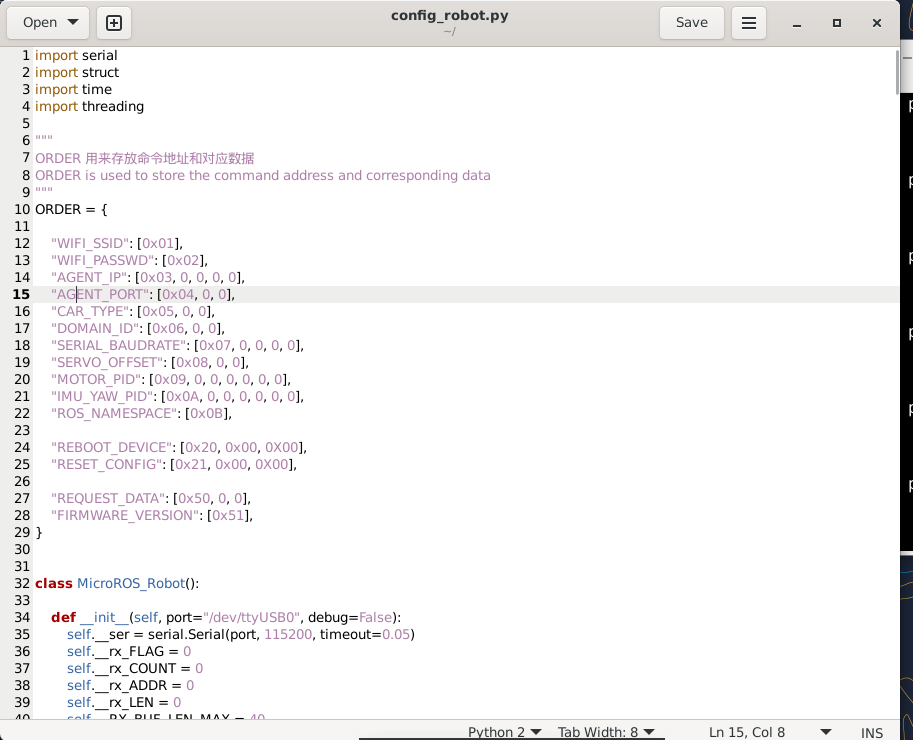
只需要修改这个id和.bashrc里面的do_main_id一样的即可互相通信,
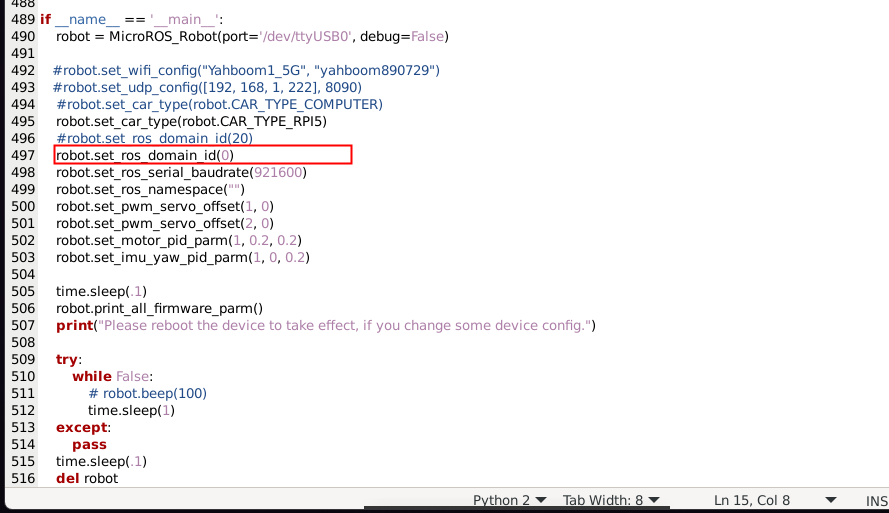
修改完之后ctrl+s保存之后叉掉。
2、配置文件写入
配置好config_robot.py文件之后,在终端使用以下指令写入到小车,
xxxxxxxxxxpython3 config_robot.py
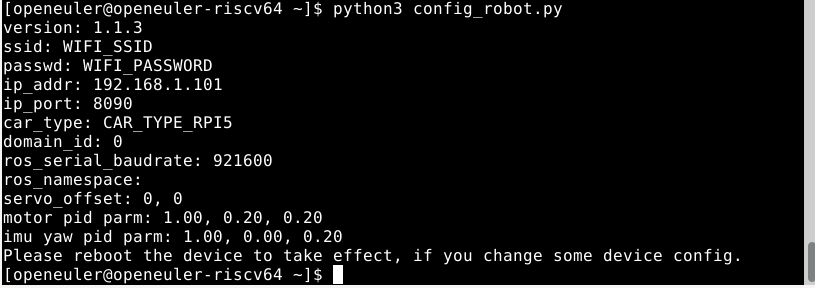
注:写入的过程中是不能连接代理的,不然会连接不上,如果代理没连接上情况下出现了node,需要按一下扩展版的复位。
3、修改.bashrc文件
在终端输入以下指令打开.bashrc文件
xxxxxxxxxxsudo vi ~/.bashrc
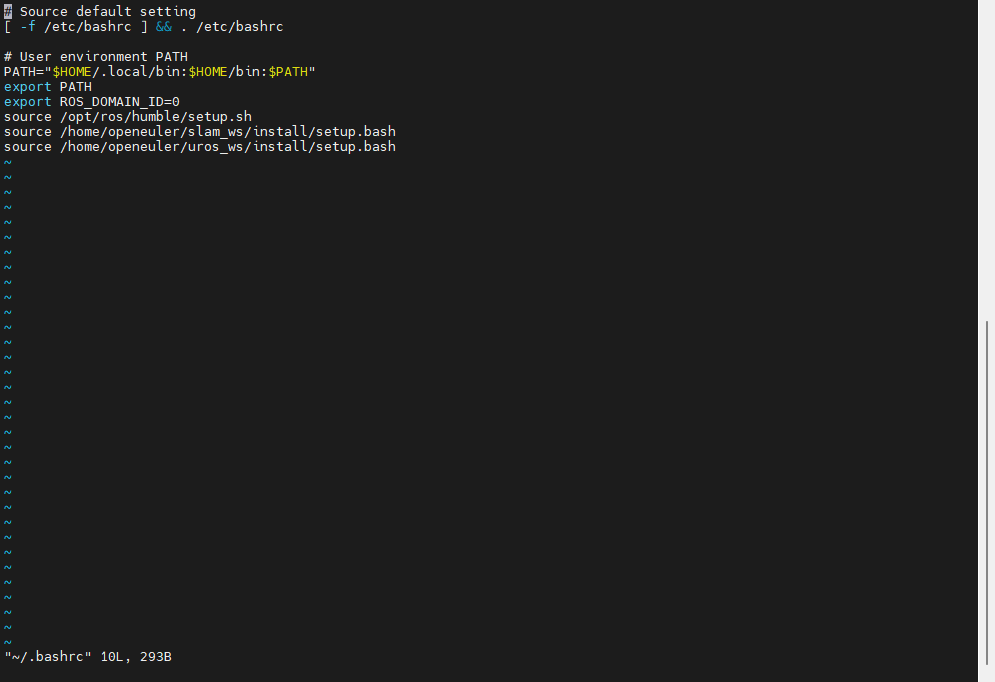
其中export ROS_DOMAIN_ID=0,就是id,这里设置成0和上面配置小车ID是一样的,这样既可以互相通信和数据传输。
4、测试
打开终端输入以下指令,连接小车代理,
xxxxxxxxxxsh start_agent.sh
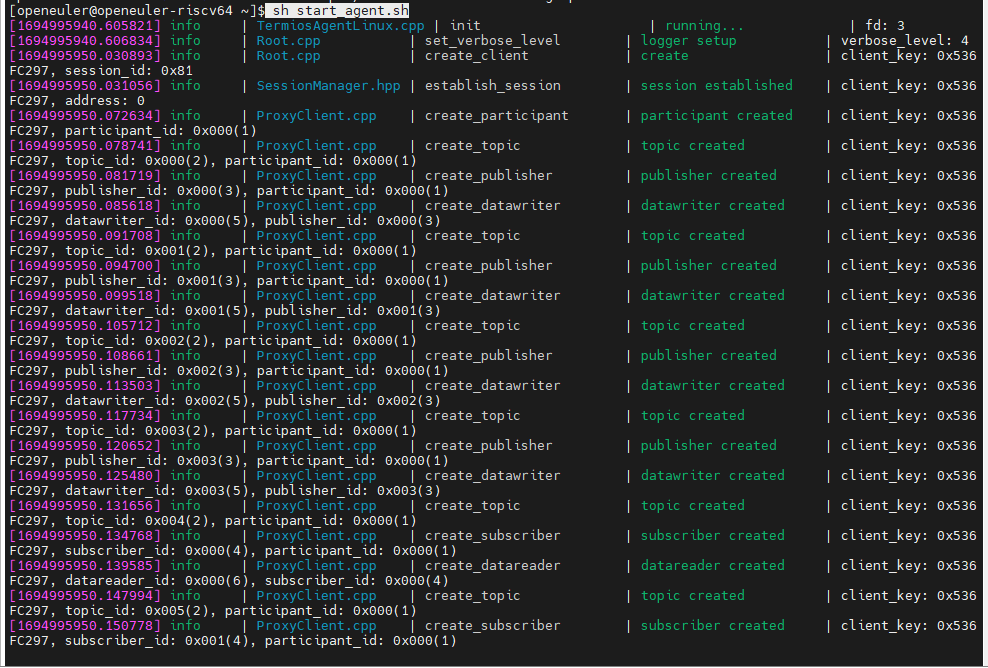
注:如果卡在前面两条log,可以按一下小车上的复位按键,这是因为第二次连代理需要重置一下。
打开另一个终端输入以下指令,
xxxxxxxxxxros2 node list
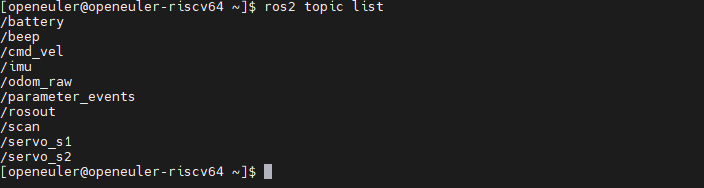
出现这个界面说明id配置正确,可以进行正常的通信。