SLAM_Gmapping建图
1、Gmapping简介
gmapping只适用于单帧二维激光点数小于1440的点,如果单帧激光点数大于1440,那么就会出【[mapping-4] process has died】 这样的问题。
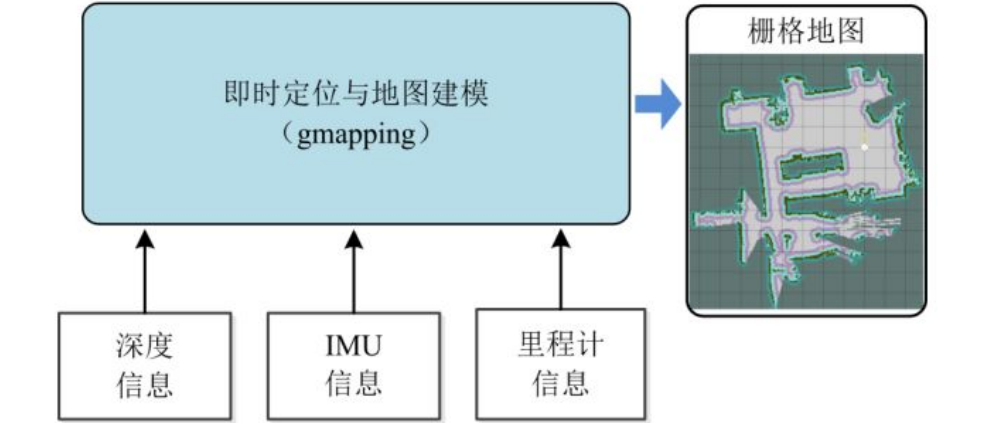
Gmapping是基于滤波SLAM框架的常用开源SLAM算法。
Gmapping基于RBpf粒子滤波算法,即时定位和建图过程分离,先进行定位再进行建图。
Gmapping在RBpf算法上做了两个主要的改进:改进提议分布和选择性重采样。
优点:Gmapping可以实时构建室内地图,在构建小场景地图所需的计算量较小且精度较高。
缺点:随着场景增大所需的粒子增加,因为每个粒子都携带一幅地图,因此在构建大地图时所需内存和计算量都会增加。因此不适合构建大场景地图。并且没有回环检测,因此在回环闭合时可能会造成地图错位,虽然增加粒子数目可以使地图闭合但是以增加计算量和内存为代价。
2、程序功能说明
小车连接上代理,运行程序,rviz中会显示建图的界面,用键盘或者手柄去控制小车运动,直到建完图。然后运行保存地图的指令保存地图。
3、查询小车信息
3.1、启动并连接代理
RISC-V小车成功开机后,需要临时关闭掉自启动程序防止冲突(详情查看《0.开机自启动和临时关闭》),打开终端输入以下指令打开代理,连接成功如下图所示,
sh start_agent.sh
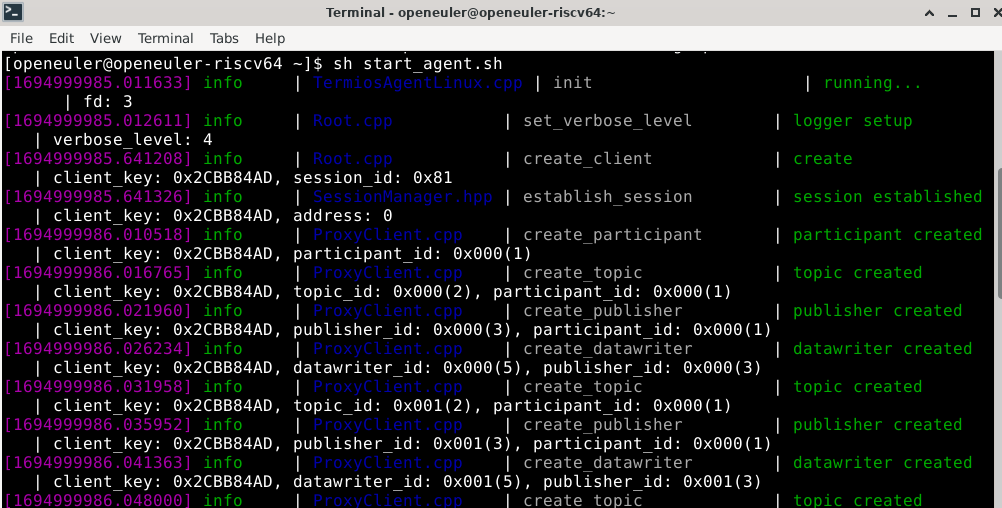
注:如果卡在前面两条log,可以按一下小车上的复位按键,这是因为第二次连代理需要重置一下。
3、启动程序
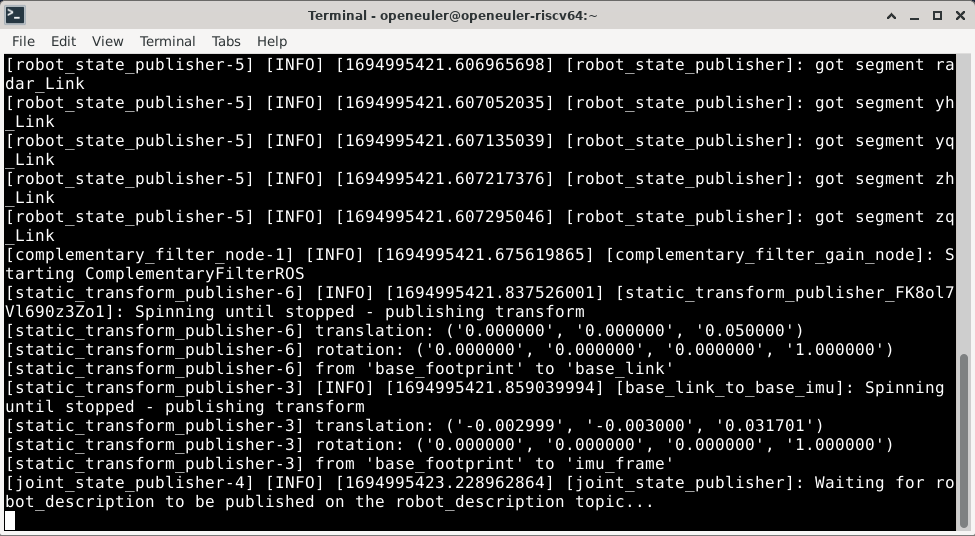
首先启动小车处理底层数据程序,终端输入,
xxxxxxxxxxros2 launch yahboomcar_bringup yahboomcar_bringup_launch.py
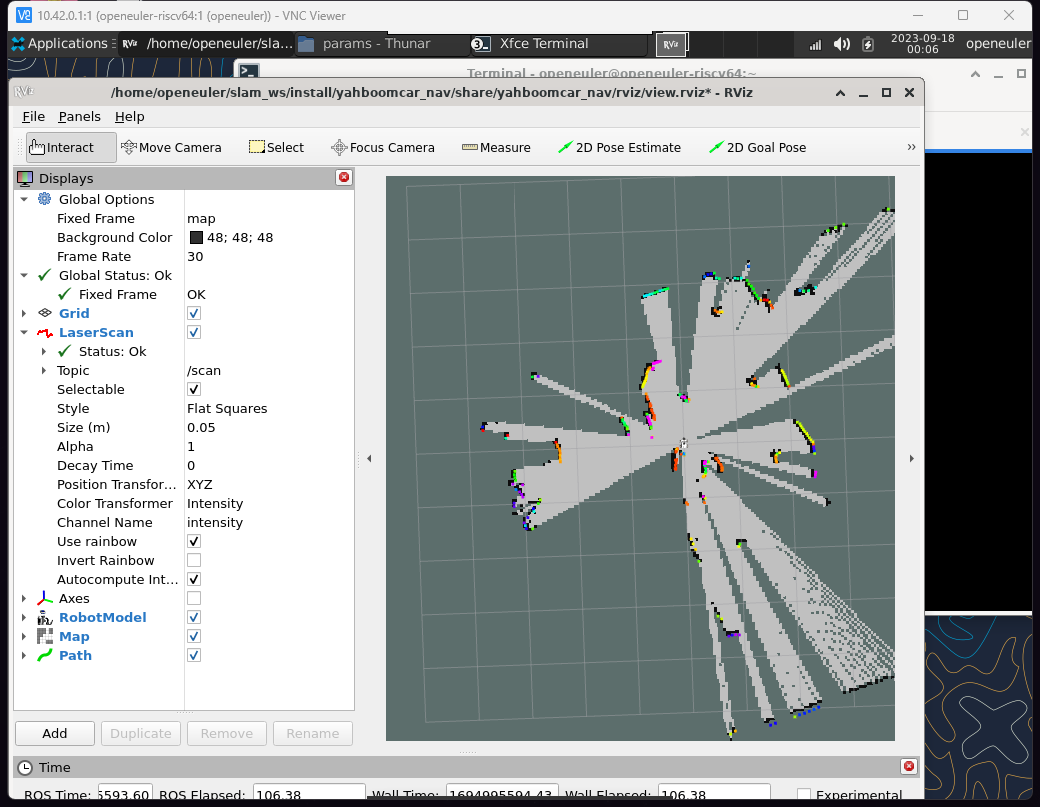
输入指令启动rviz可视化建图
xxxxxxxxxxros2 launch yahboomcar_nav display_launch.py
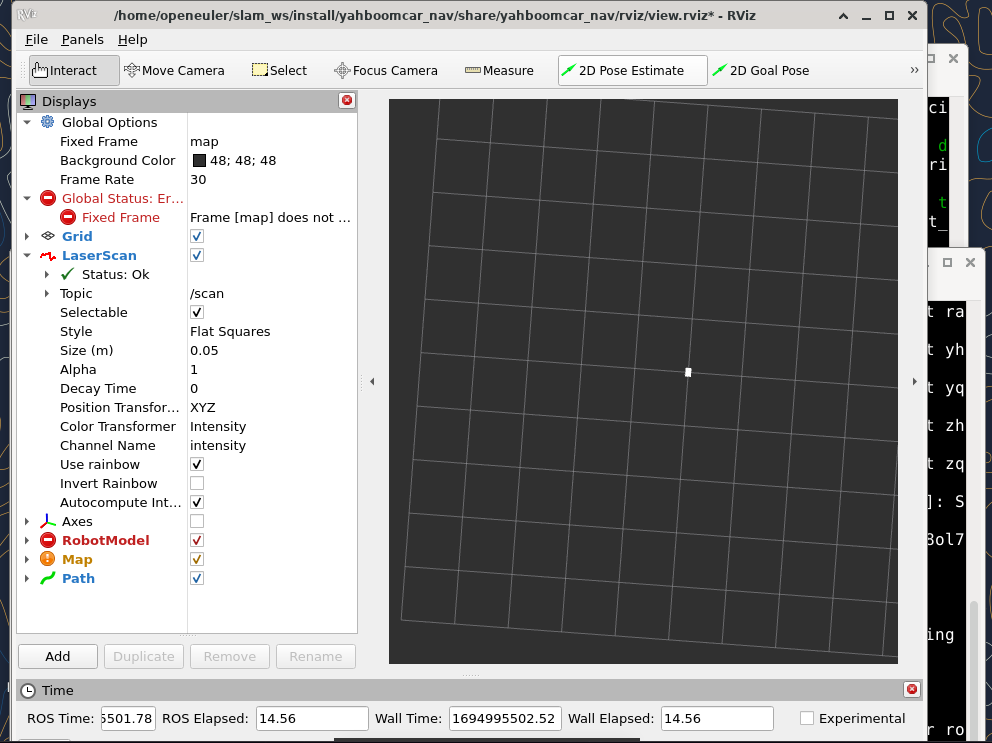
此时还没运行建图节点,所以没有数据。接下来运行建图节点,终端输入,
xxxxxxxxxxros2 launch yahboomcar_nav map_gmapping_launch.py
然后运行手柄控制或者键盘控制,二选一,终端输入,
xxxxxxxxxx#键盘ros2 run yahboomcar_ctrl yahboom_keyboard#手柄ros2 run yahboomcar_ctrl yahboom_joyros2 run joy joy_node然后控制小车,缓慢的走完需要建图的区域,建图完毕后,输入以下指令保存地图,终端输入,
xxxxxxxxxxros2 launch yahboomcar_nav save_map_launch.py
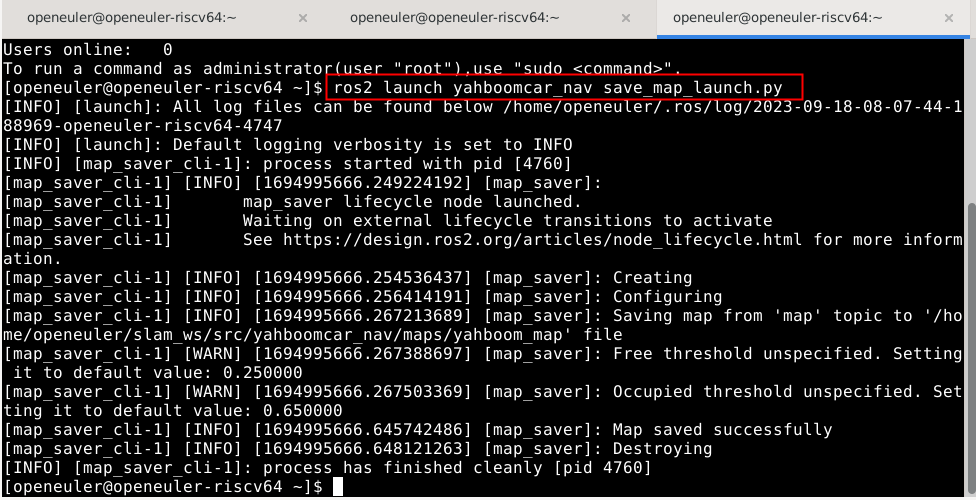
会保存一个命名为yahboom_map的地图,这个地图保存在,
xxxxxxxxxx/home/openeuler/slam_ws/src/yahboomcar_nav/maps
会有两个文件生成,一个是yahboom_map.pgm,一个是yahboom_map.yaml,看下yaml的内容,
xxxxxxxxxximage: yahboom_map.pgmmode: trinaryresolution: 0.05origin: [-10, -10, 0]negate: 0occupied_thresh: 0.65free_thresh: 0.25
image:表示地图的图片,也就是yahboom_map.pgm
mode:该属性可以是trinary、scale或者raw之一,取决于所选择的mode,trinary模式是默认模式
resolution:地图的分辨率, 米/像素
origin:地图左下角的 2D 位姿(x,y,yaw), 这里的yaw是逆时针方向旋转的(yaw=0 表示没有旋转)。目前系统中的很多部分会忽略yaw值。
negate:是否颠倒 白/黑 、自由/占用 的意义(阈值的解释不受影响)
occupied_thresh:占用概率大于这个阈值的的像素,会被认为是完全占用。
free_thresh:占用概率小于这个阈值的的像素,会被认为是完全自由。
5、查看节点通讯图
终端输入,
xxxxxxxxxxros2 run rqt_graph rqt_graph
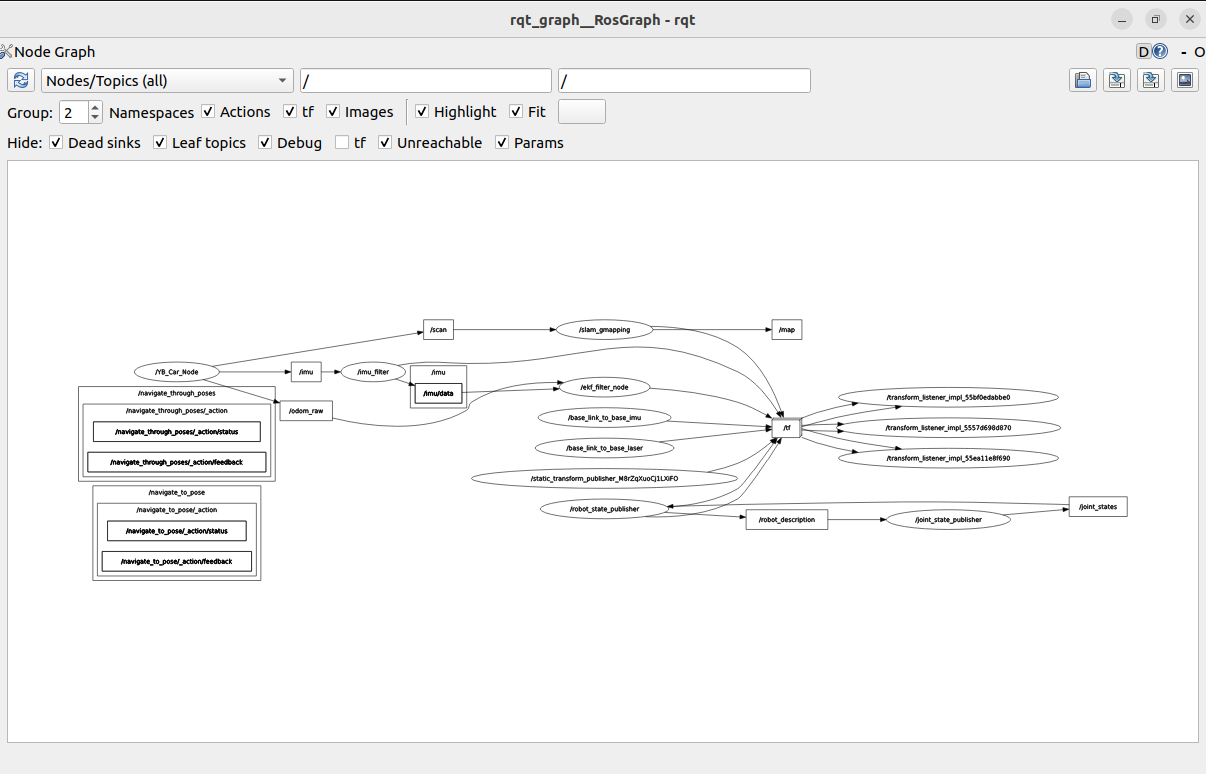
如果一开始没有显示,选择【Nodes/Topics(all)】,然后点击左上角的刷新按钮。
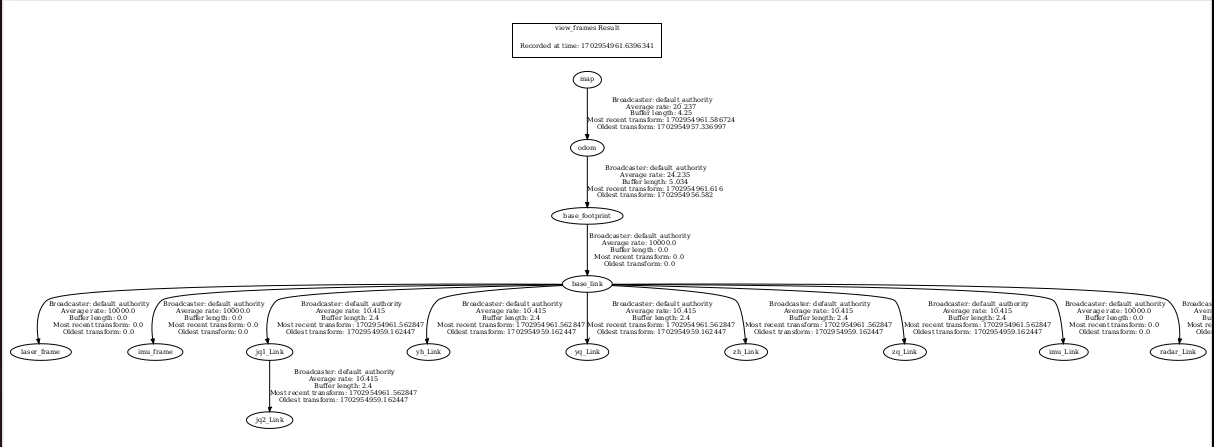
6、查看TF树
终端输入,
xxxxxxxxxxros2 run tf2_tools view_frames
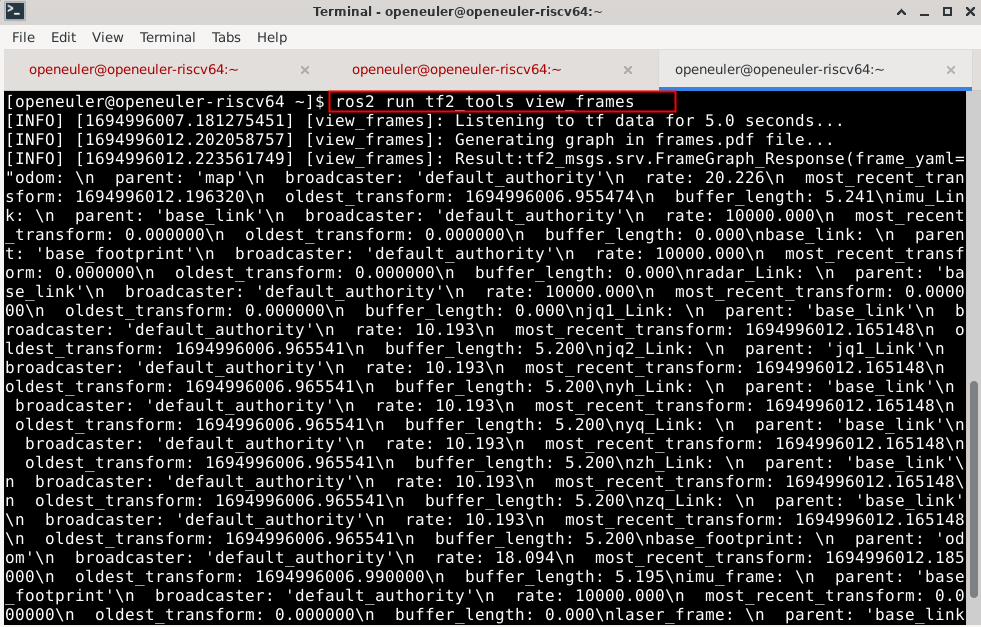
运行完毕后,会在终端的目录下生成两个文件分别是.gv和.pdf文件,其中的pdf文件就是TF树。
7、代码解析
这里只说明建图的map_gmapping_launch.py,这个文件路径是,
xxxxxxxxxx/home/openeuler/slam_ws/src/yahboomcar_nav/launch
map_gmapping_launch.py
xfrom launch import LaunchDescriptionfrom launch_ros.actions import Nodeimport osfrom launch.actions import IncludeLaunchDescriptionfrom launch.launch_description_sources import PythonLaunchDescriptionSourcefrom ament_index_python.packages import get_package_share_directorydef generate_launch_description():slam_gmapping_launch = IncludeLaunchDescription(PythonLaunchDescriptionSource([os.path.join(get_package_share_directory('slam_gmapping'), 'launch'),'/slam_gmapping.launch.py']))base_link_to_laser_tf_node = Node(package='tf2_ros',executable='static_transform_publisher',name='base_link_to_base_laser',arguments=['-0.0046412', '0' , '0.094079','0','0','0','base_link','laser_frame'])return LaunchDescription([slam_gmapping_launch,base_link_to_laser_tf_node])
这里启动了一个launch文件-slam_gmapping_launch和一个发布静态变换的节点-base_link_to_laser_tf_node。详细看下slam_gmapping_launch,该文件位于,
xxxxxxxxxx/home/openeuler/slam_ws/src/slam_gmapping/launch
slam_gmapping.launch.py,
xxxxxxxxxxfrom launch import LaunchDescriptionfrom launch.substitutions import EnvironmentVariableimport launch.actionsimport launch_ros.actionsimport osfrom ament_index_python.packages import get_package_share_directorydef generate_launch_description():return LaunchDescription([launch_ros.actions.Node(package='slam_gmapping',executable='slam_gmapping',output='screen',parameters=[os.path.join(get_package_share_directory("slam_gmapping"), "params", "slam_gmapping.yaml")]),])
这里启动了slam_gmapping的节点,加载了slam_gmapping.yaml参数文件,该文件位于(以配套虚拟机为例),
xxxxxxxxxx/home/openeuler/slam_ws/src/slam_gmapping/params
slam_gmapping.yaml
xxxxxxxxxx/slam_gmapping: ros__parameters: angularUpdate: 0.5 astep: 0.05 base_frame: base_footprint map_frame: map odom_frame: odom delta: 0.05 iterations: 5 kernelSize: 1 lasamplerange: 0.005 lasamplestep: 0.005 linearUpdate: 1.0 llsamplerange: 0.01 llsamplestep: 0.01 lsigma: 0.075 lskip: 0 lstep: 0.05 map_update_interval: 5.0 maxRange: 6.0 maxUrange: 4.0 minimum_score: 0.0 occ_thresh: 0.25 ogain: 3.0 particles: 30 qos_overrides: /parameter_events: publisher: depth: 1000 durability: volatile history: keep_all reliability: reliable /tf: publisher: depth: 1000 durability: volatile history: keep_last reliability: reliable resampleThreshold: 0.5 sigma: 0.05 srr: 0.1 srt: 0.2 str: 0.1 stt: 0.2 temporalUpdate: 1.0 transform_publish_period: 0.05 use_sim_time: false xmax: 10.0 xmin: -10.0 ymax: 10.0 ymin: -10.0