建图导航APP控制
1、程序功能说明
小车连接上代理,运行程序,打开手机上下载的【ROS Robot】app,输入小车的IP地址,选择ROS2,点击连接,即可连接上小车。通过滑动界面的轮盘可以控制小车,缓慢控制小车走完建图的区域,最后点击保存地图,小车会保存当前建好的地图。
2、查询小车信息
2.1、手动启动代理连接
RISC-V小车成功开机后,需要临时关闭掉自启动程序防止冲突(详情查看《0.开机自启动和临时关闭》),打开终端输入以下指令打开代理,连接成功如下图所示,
xxxxxxxxxxsh start_agent.sh
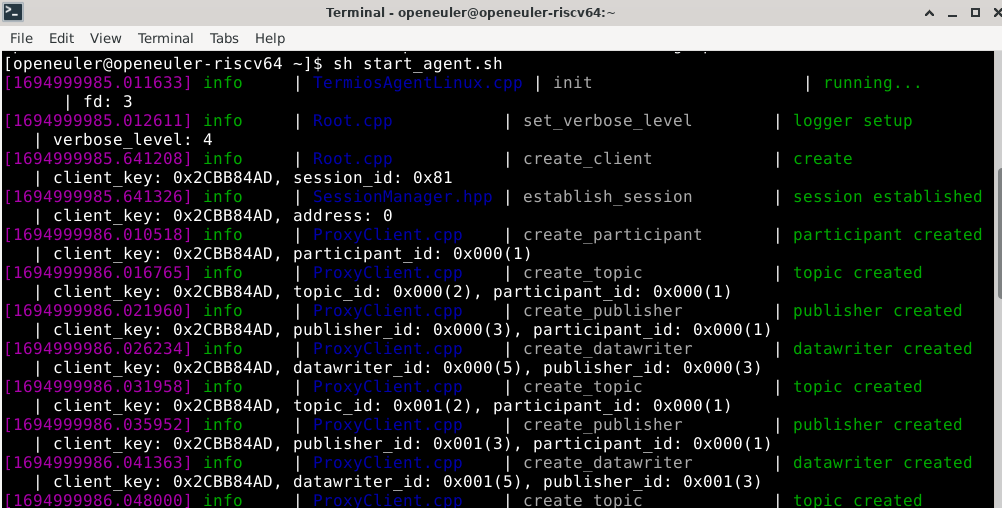
注:如果卡在前面两条log,可以按一下小车上的复位按键,这是因为第二次连代理需要重置一下。
3、启动程序
首先启动小车处理底层数据程序,终端输入,
xxxxxxxxxxros2 launch yahboomcar_bringup yahboomcar_bringup_launch.py
启动APP建图命令,输入指令启动建图。
xxxxxxxxxxros2 launch yahboomcar_nav map_gmapping_app_launch.xml
手机APP显示如下图,输入小车的IP地址热点的话ip是:10.42.0.1,【zh】表示中文,【en】表示英文;选择ROS2,下边的选择/usb_cam/image_raw/compressed,最后点击【连接】
成功连接上后,显示如下,
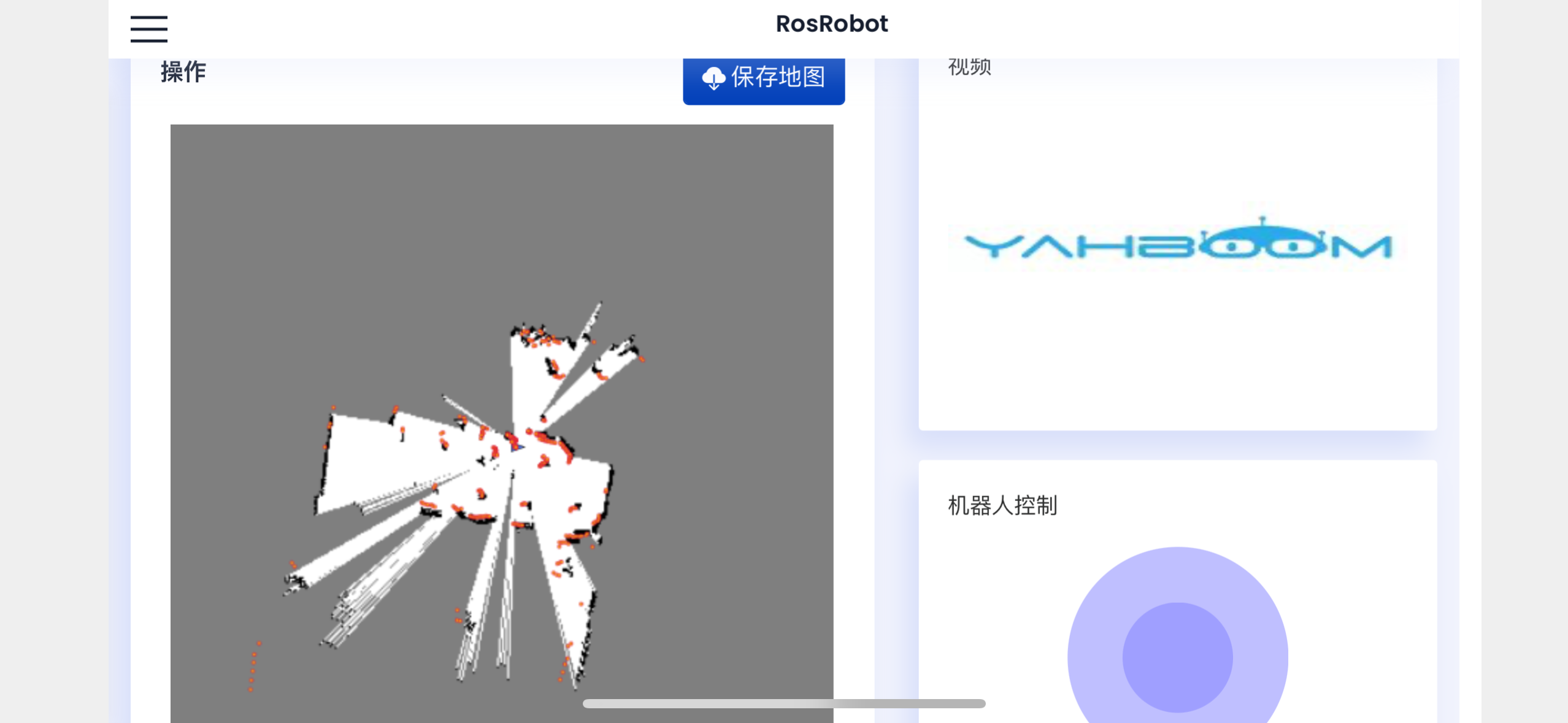
通过滑动轮盘控制小车缓慢移动走完需要建图的区域,然后点击保存地图,输入地图名字点击提交,即可保存地图
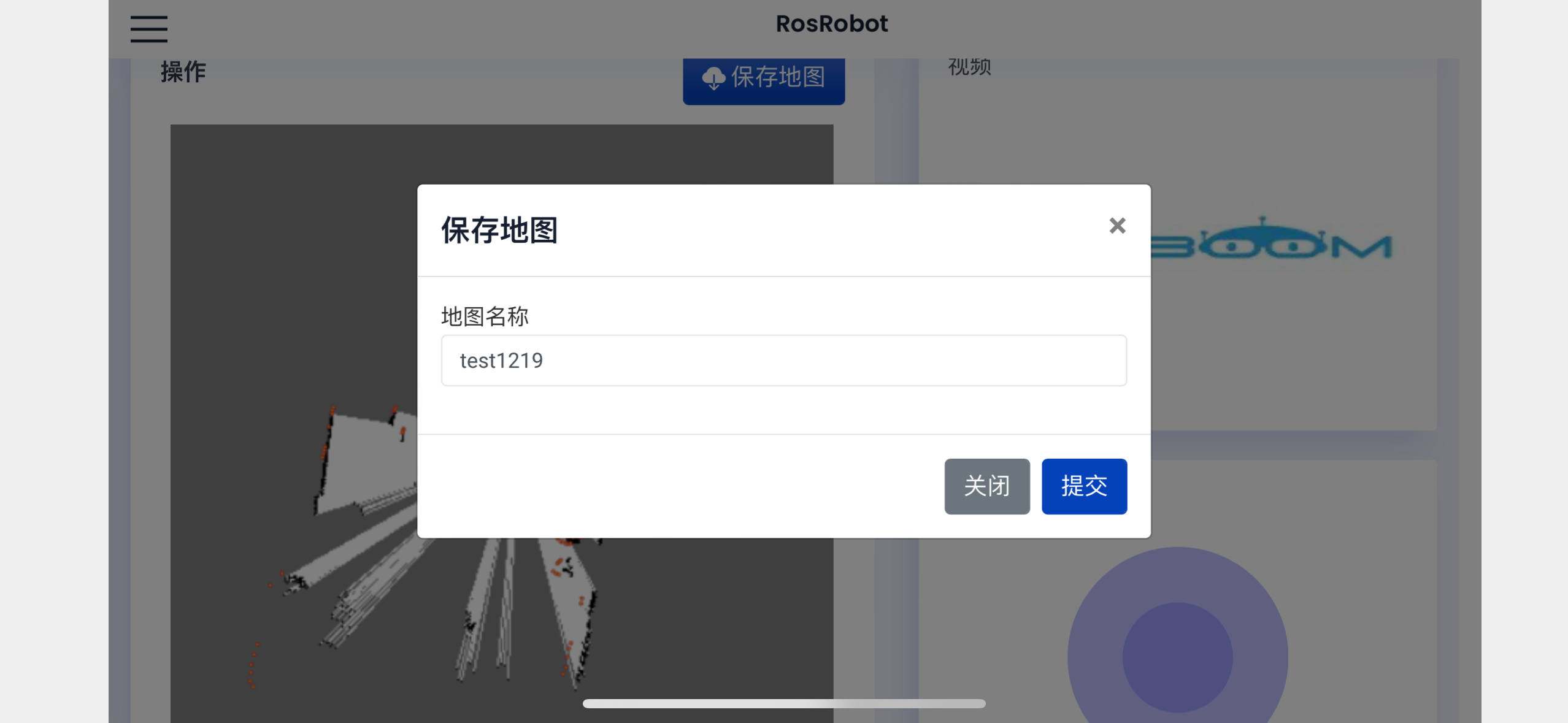
地图保存的位置是,
xxxxxxxxxx/home/openeuler/slam_ws/yahboomcar_ws/src/yahboomcar_nav/maps
本教程主要是用于使用手机APP来控制小车,迟到同时查看雷达点云数据。