机器人手柄控制
1、程序功能说明
小车连接上代理,把手柄的接收器接入树莓派5端口,运行程序,即可用遥控控制小车运动、蜂鸣器和云台舵机。
2、启动并连接代理
RISC-V小车成功开机后,需要临时关闭掉自启动程序防止冲突(详情查看《0.开机自启动和临时关闭》),打开终端输入以下指令打开代理,连接成功如下图所示,
sh ~/sh start_agent.sh
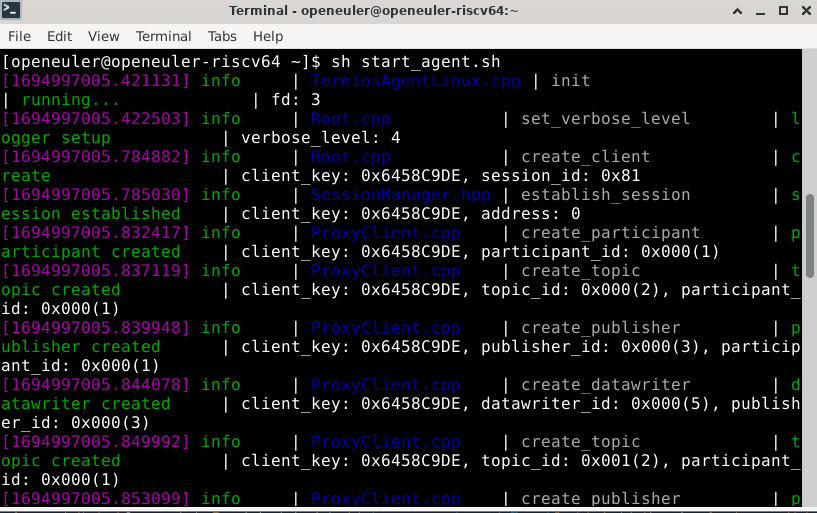
注:如果卡在前面两条log,可以按一下小车上的复位按键,这是因为第二次连代理需要重置一下。
3、启动手柄控制程序
手动打开手柄控制程序。打开一个终端输入
xxxxxxxxxx#手柄遥控控制小车程序ros2 run joy joy_node
打开另一个终端输入
xxxxxxxxxxros2 run yahboomcar_ctrl yahboom_joy

遥控按键说明如下:
左边摇杆:前后方向有效,控制小车前进后退,左右方向无效
右边摇杆:左右方向有效,控制小车左右转动,前后方向无效
START键:蜂鸣器控制
Y键:控制S2舵机向上
A键:控制S2舵机向下
X键:控制S1舵机向左
B键:控制S1舵机向右
R1键:手柄控制速度开关,按下后才能用遥控控制小车速度,再次按下则失去手柄控制速度,同时 也是玩法开关,按下后停车,再次按下则是继续运行功能玩法程序,包括雷达避障、雷达警卫等 等。
MODE键:切换模式,使用默认模式,切换模式后,键值不对,程序会报错退出。
5、节点通讯图
终端输入,
xxxxxxxxxxros2 run rqt_graph rqt_graph
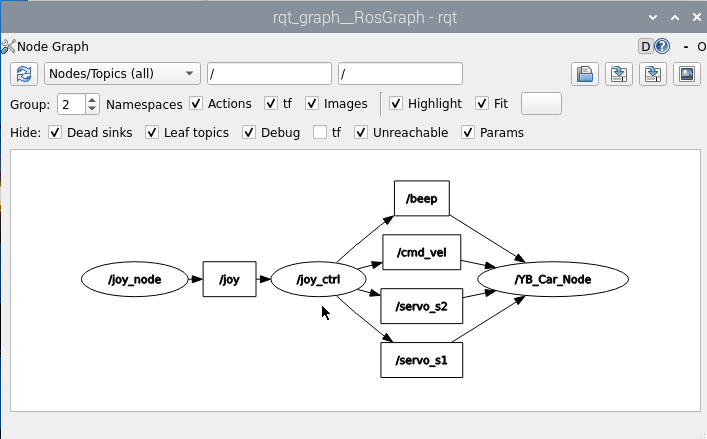
如果一开始没有显示,选择【Nodes/Topics(all)】,然后点击左上角的刷新按钮。
6、代码解析
源码参考路径,
xxxxxxxxxx/home/openeuler/slam_ws/src/yahboomcar_ctrl/yahboomcar_ctrlyahboom_joy.py
x#创建订阅者订阅/joy话题数据self.sub_Joy = self.create_subscription(Joy,'joy', self.buttonCallback,10)
#创建发布者发布速度、舵机、蜂鸣器话题数据以及功能玩法开关self.pub_cmdVel = self.create_publisher(Twist,'cmd_vel',10)self.pub_Buzzer = self.create_publisher(UInt16,"beep", 1)self.pub_JoyState = self.create_publisher(Bool,"JoyState", 10)self.pub_Servo1 = self.create_publisher(Int32,"servo_s1" , 10)self.pub_Servo2 = self.create_publisher(Int32,"servo_s2" , 10)
#回调函数def buttonCallback(self,joy_data): if not isinstance(joy_data, Joy): return self.user_jetson(joy_data) #处理按键函数user_jetsondef user_jetson(self, joy_data): #cancel nav if joy_data.buttons[7] == 1: self.cancel_nav() #Buzzer 蜂鸣器控制 if joy_data.buttons[11] == 1: b = UInt16() self.Buzzer_active = not self.Buzzer_active b.data = self.Buzzer_active self.pub_Buzzer.publish(b) #档位调整,按下摇杆即可调节档位 xlinear_speed = self.filter_data(joy_data.axes[1]) * self.xspeed_limit * self.linear_Gear angular_speed = self.filter_data(joy_data.axes[2]) * self.angular_speed_limit * self.angular_Gear if xlinear_speed > self.xspeed_limit: xlinear_speed = self.xspeed_limit elif xlinear_speed < -self.xspeed_limit: xlinear_speed = -self.xspeed_limit if angular_speed > self.angular_speed_limit: angular_speed = self.angular_speed_limit elif angular_speed < -self.angular_speed_limit: angular_speed = -self.angular_speed_limit twist = Twist() twist.linear.x = xlinear_speed twist.linear.y = 0.0 twist.angular.z = angular_speed #判断是否能够控制速度,即R1键是否有按下 if self.Joy_active == True: self.pub_cmdVel.publish(twist) #以下是处理舵机控制的数据,按下后角度会自加1/自减1,持续按下就持续的加减 if not joy_data.buttons[1] == 0: print("Up") self.PWMServo_X += 1 if self.PWMServo_X <= -90: self.PWMServo_X = -90 elif self.PWMServo_X >= 90: self.PWMServo_X = 90 print("self.PWMServo_X: ",self.PWMServo_X) print("self.PWMServo_Y: ",self.PWMServo_Y) servo1_angle = Int32() servo1_angle.data = self.PWMServo_X self.pub_Servo1.publish(servo1_angle)
if not joy_data.buttons[3] == 0: print("Down") self.PWMServo_X -= 1 if self.PWMServo_X <= -90: self.PWMServo_X = -90 elif self.PWMServo_X >= 90: self.PWMServo_X = 90 print("self.PWMServo_X: ",self.PWMServo_X) print("self.PWMServo_Y: ",self.PWMServo_Y) servo1_angle = Int32() servo1_angle.data = self.PWMServo_X self.pub_Servo1.publish(servo1_angle)
if not joy_data.buttons[0] == 0: print("Left") self.PWMServo_Y -= 1 if self.PWMServo_Y <= -90: self.PWMServo_Y = -90 elif self.PWMServo_Y >= 20: self.PWMServo_Y = 20 servo2_angle = Int32() servo2_angle.data = self.PWMServo_Y self.pub_Servo2.publish(servo2_angle) print("self.PWMServo_X: ",self.PWMServo_X) print("self.PWMServo_Y: ",self.PWMServo_Y)
if not joy_data.buttons[4] == 0: print("Right") self.PWMServo_Y += 1 if self.PWMServo_Y <= -90: self.PWMServo_Y = -90 elif self.PWMServo_Y >= 20: self.PWMServo_Y = 20 servo2_angle = Int32() servo2_angle.data = self.PWMServo_Y self.pub_Servo2.publish(servo2_angle) print("self.PWMServo_X: ",self.PWMServo_X) print("self.PWMServo_Y: ",self.PWMServo_Y)7、遥控键值对应的变量
基于默认的模式【Controller】,遥控对应的键值如下,
| 遥控事件 | 对应变量 |
|---|---|
| 左摇杆往上 | axes[1]=1 |
| 左摇杆往下 | axes[1]=-1 |
| 右摇杆往左 | axes[2]=1 |
| 右摇杆往右 | axes[2]=-1 |
| 按键X按下 | button[3]=1 |
| 按键B按下 | button[1]=1 |
| 按键Y按下 | button[4]=1 |
| 按键R1按下 | button[7]=1 |
| start按键按下 | button[11]=1 |
| 左摇杆按下 | button[13]=1 |
| 右摇杆按下 | button[14]=1 |
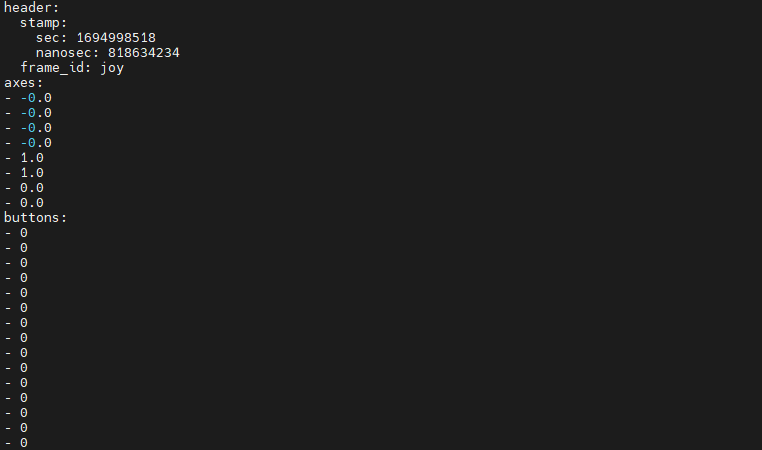
结合上边的源码方便理解,当这些值改变的时候,说明遥控被按下,即可执行相对应的程序。查看其它的按键按下,可以订阅/joy话题,终端输入,
xxxxxxxxxxros2 topic echo /joy