7、控制电机正转反转
7.1、实验目标
控制Rosmaster上的电机正转和反转,通过控制电机的PWM占空比,从而控制电机的运动速度。
7.2、实验准备
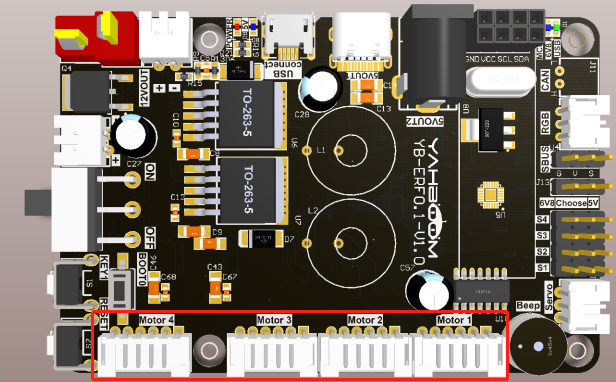
下图片中红色方框位置为电机MOTOR 1, MOTOR 2, MOTOR 3, MOTOR 4。电机接口具有防反接功能,使用Rosmaster的电机排线连接到电机即可。这里需要注意根据不同的车型连接电机,这里以麦克纳姆轮小车为例,MOTOR 1连接到小车的左前方电机,MOTOR 2连接到小车的左后方电机,MOTOR 3连接到小车的右前方电机,MOTOR 4连接到小车的右后方电机。
控制Rosmaster的电机需要用到的Rosmaster_Lib库函数:
set_motor(speed_1, speed_2, speed_3, speed_4)参数解释:控制电机PWM脉冲,从而控制电机速度。此函数没有使用编码器测速功能。
speed_X=[-100, 100],正数为向前转,负数为向后转。
返回值:无。
7.3、实验效果
请查看课程配套视频。
由于此功能是通过修改PWM占空比的方式控制电机的转动,所以只能用于测试电机是否正常工作,在实际使用过程比较少用到此功能。
7.4、程序源码
将Rosmaster机器人打开电源开机,并打开Jetson Nano或者远程电脑的浏览器进入Jupyter lab编辑器。
参考代码路径:Rosmaster/Samples/7.motor.ipynb