10、tf发布与监听
10.1、tf功能包
10.1.1、tf是一个让用户随时间跟踪多个坐标系的功能包,它使用树形数据结构,根据时间缓冲并维护多个坐标系之间的坐标变换关系,可以帮助开发者在任意时间、坐标系间完成点、向量等坐标变换。
10.1.2、使用步骤
1)、监听tf变换
接收并缓存系统中发布的所有坐标系变换数据,并从中查询所需要的坐标变换关系。
2)、广播tf变换
向系统中广播坐标系之间的坐标变换关系。系统中可能会存在多个不同部分的tf变换广播。每个广播都可以直接将坐标变换关系插入tf树中,不需要再进行同步。
10.2、tf坐标系广播与监听的编程实现
10.2.1、创建并且编译功能包
cd ~/catkin_ws/srccatkin_create_pkg learning_tf rospy roscpp turtlesim tfcd ..catkin_make
10.2.2、如何实现一个tf广播器
1)、定义tf广播器(TransformBroadcaster);
2)、初始化tf数据,创建坐标变换值;
3)、发布坐标变换(sendTransform);
10.2.3、如何实现一个tf监听器
1)、定义TF监听器(TransformListener);
2)、查找坐标变换(waitForTransform、lookupTransform)
10.2.4、C++语言实现tf广播器
1)、在功能包learning_tf的src文件夹,创建一个c++文件(文件后缀为.cpp),命名为turtle_tf_broadcaster.cpp
2)、把下边的程序代码复制粘贴到turtle_tf_broadcaster.cpp文件中
x
std::string turtle_name;
void poseCallback(const turtlesim::PoseConstPtr& msg){ static tf::TransformBroadcaster br;// 创建tf的广播器
// 初始化tf数据 tf::Transform transform; transform.setOrigin( tf::Vector3(msg->x, msg->y, 0.0) );//设置xyz坐标 tf::Quaternion q; q.setRPY(0, 0, msg->theta);//设置欧拉角:以x轴,y轴,z轴旋转 transform.setRotation(q);
br.sendTransform(tf::StampedTransform(transform, ros::Time::now(), "world", turtle_name));// 广播world与turtle坐标系之间的tf数据}
int main(int argc, char** argv){ ros::init(argc, argv, "turtle_world_tf_broadcaster");// 初始化ROS节点
if (argc != 2) { ROS_ERROR("Missing a parameter as the name of the turtle!"); return -1; } turtle_name = argv[1];// 输入参数作为海龟的名字
// 订阅海龟的位姿话题/pose ros::NodeHandle node; ros::Subscriber sub = node.subscribe(turtle_name+"/pose", 10, &poseCallback);
// 循环等待回调函数 ros::spin();
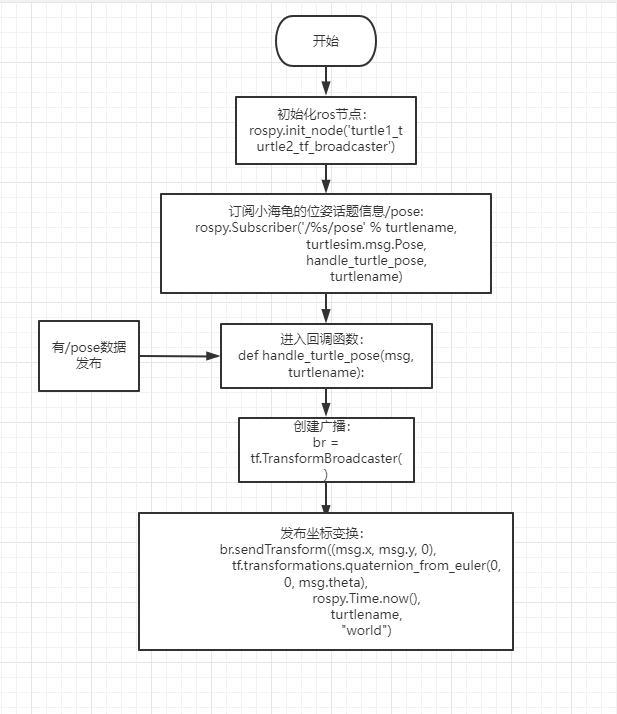
return 0;};3)、程序流程图
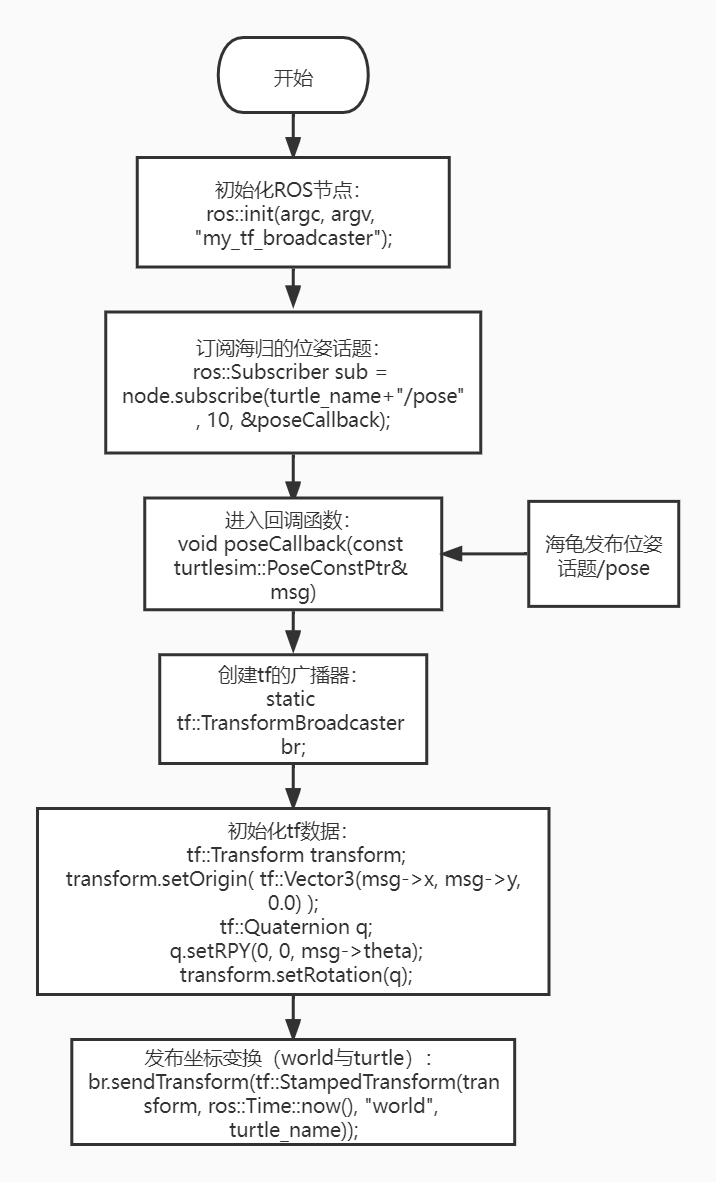
4)、代码解析
首先,先订阅小海龟的/pose位姿话题,倘若有该话题发布,那么就进入回调函数。再回调函数里边,首先先创建了tf的广播器,然后初始化tf数据,数据的值就是订阅/pose话题传过来的数据。最后,通过br.sendTransform把小海龟对于世界坐标的变换发布出去,这里说下sendTransform这个函数。有4个参数,第一个参数表示tf::Transform类型的坐标转换(也就是之前初始化的tf数据),第二个参数是时间戳,第三个和第四个是变换的源坐标系和目标坐标系。
10.2.4、C++语言实现tf监听器
1)、在功能包learning_tf的src文件夹,创建一个c++文件(文件后缀为.cpp),命名为turtle_tf_listener.cpp
2)、把下边的程序代码复制粘贴到turtle_tf_listener.cpp文件中
xxxxxxxxxx/** * 该例程监听tf数据,并计算、发布turtle2的速度指令 turtle2->turtle1 = world->turtle*world->turtle2 */
int main(int argc, char** argv){ ros::init(argc, argv, "turtle1_turtle2_listener");// 初始化ROS节点
ros::NodeHandle node; // 创建节点句柄
// 请求服务产生turtle2 ros::service::waitForService("/spawn"); ros::ServiceClient add_turtle = node.serviceClient<turtlesim::Spawn>("/spawn"); turtlesim::Spawn srv; add_turtle.call(srv);
// 创建发布turtle2速度控制指令的发布者 ros::Publisher vel = node.advertise<geometry_msgs::Twist>("/turtle2/cmd_vel", 10);
tf::TransformListener listener;// 创建tf的监听器
ros::Rate rate(10.0);
while (node.ok()) { // 获取turtle1与turtle2坐标系之间的tf数据 tf::StampedTransform transform; try { listener.waitForTransform("/turtle2", "/turtle1", ros::Time(0), ros::Duration(3.0)); listener.lookupTransform("/turtle2", "/turtle1", ros::Time(0), transform); } catch (tf::TransformException &ex) { ROS_ERROR("%s",ex.what()); ros::Duration(1.0).sleep(); continue; }
// 根据turtle1与turtle2坐标系之间的位置关系,通过数学计算公式,得出角速度和线速度,发布turtle2的速度控制指令 geometry_msgs::Twist turtle2_vel_msg;
turtle2_vel_msg.angular.z = 6.0 * atan2(transform.getOrigin().y(), transform.getOrigin().x()); turtle2_vel_msg.linear.x = 0.8 * sqrt(pow(transform.getOrigin().x(), 2) + pow(transform.getOrigin().y(), 2)); vel.publish(turtle2_vel_msg);
rate.sleep(); } return 0;};3)、程序流程图
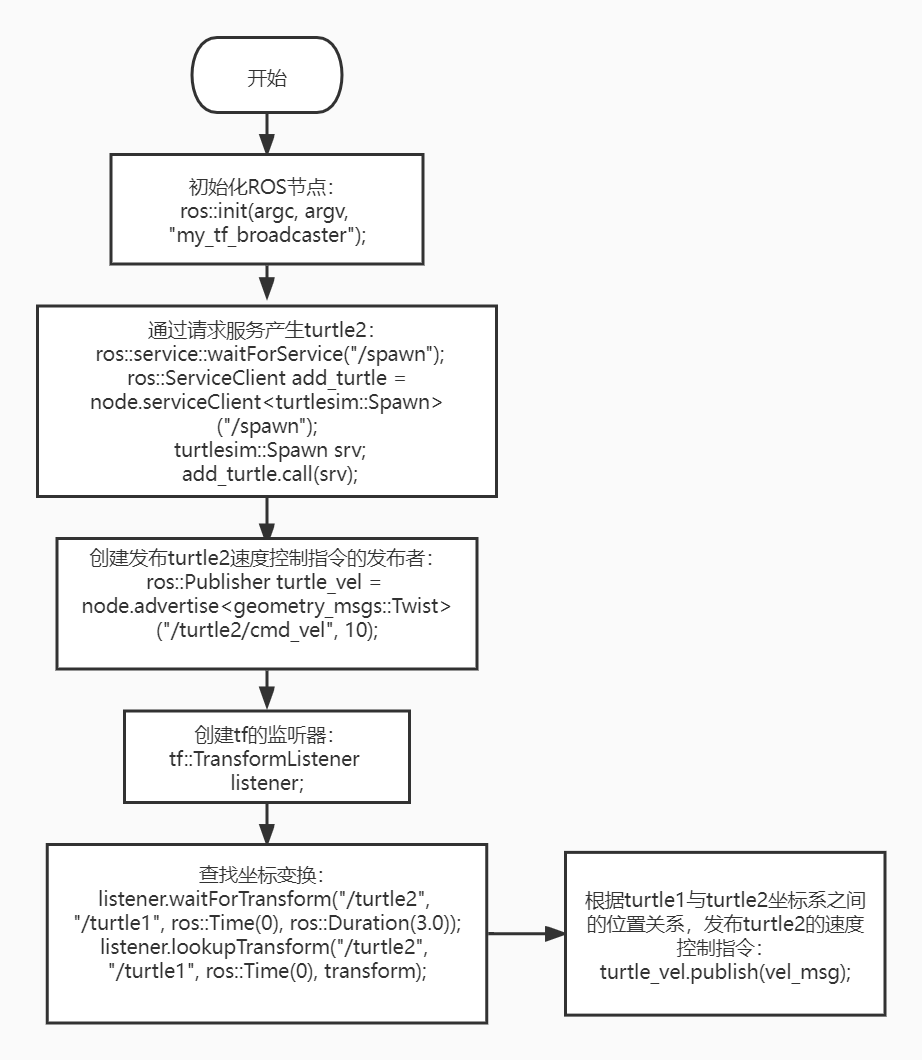
4)、代码解析
首先,通过服务调用产生另外一只小乌龟turtle2,然后创建turtle2速度控制发布者;接着创建一个监听器,监听和查找turtle1和tuetle2的左边变换,这里涉及到两个函数waitForTransform和lookupTransform
waitForTransform(target_frame,source_frame,time,timeout):两个frame分别表示目标坐标系和源坐标系,time表示等待两个坐标系之间变换的时间,因为坐标变换是阻塞程序,所以需要设置timeout,表示超时时间。
lookupTransform(target_frame,source_frame,time,transform):给定源坐标系(source_frame)和目标坐标系(target_frame),得到两个坐标系之间指定时间(time)的坐标变换(transform)。
经过lookupTransform我们得到了坐标变换的结果transform,然后通过transform.getOrigin().y(),transform.getOrigin().x()得到x,y的值,接着通过数学运算得到角速度angular.z和线速度linear.x,最后发布出去,让turtle2做运动。
10.2.5、修改CMakelist.txt和编译
1)、修改修改CMakelist.txt
修改功能包下的CMakelist.txt,添加下边内容
xxxxxxxxxxadd_executable(turtle_tf_listener src/turtle_tf_listener.cpp)target_link_libraries(turtle_tf_listener ${catkin_LIBRARIES})add_executable(turtle_tf_broadcaster src/turtle_tf_broadcaster.cpp)target_link_libraries(turtle_tf_broadcaster ${catkin_LIBRARIES})
2)、编译
xxxxxxxxxxcd ~/catkin_wscatkin_makesource devel/setup.bash #需要配置环境变量,否则系统无法找到运行程序
10.2.6、启动与运行效果演示
1)、启动
xxxxxxxxxxroscorerosrun turtlesim turtlesim_noderosrun learning_tf turtle_tf_broadcaster __name:=turtle1_tf_broadcaster /turtle1rosrun learning_tf turtle_tf_broadcaster __name:=turtle2_tf_broadcaster /turtle2rosrun learning_tf turtle_tf_listenerrosrun turtlesim turtle_teleop_key #打开海龟键盘控制程序,控制海龟运动2)、效果展示
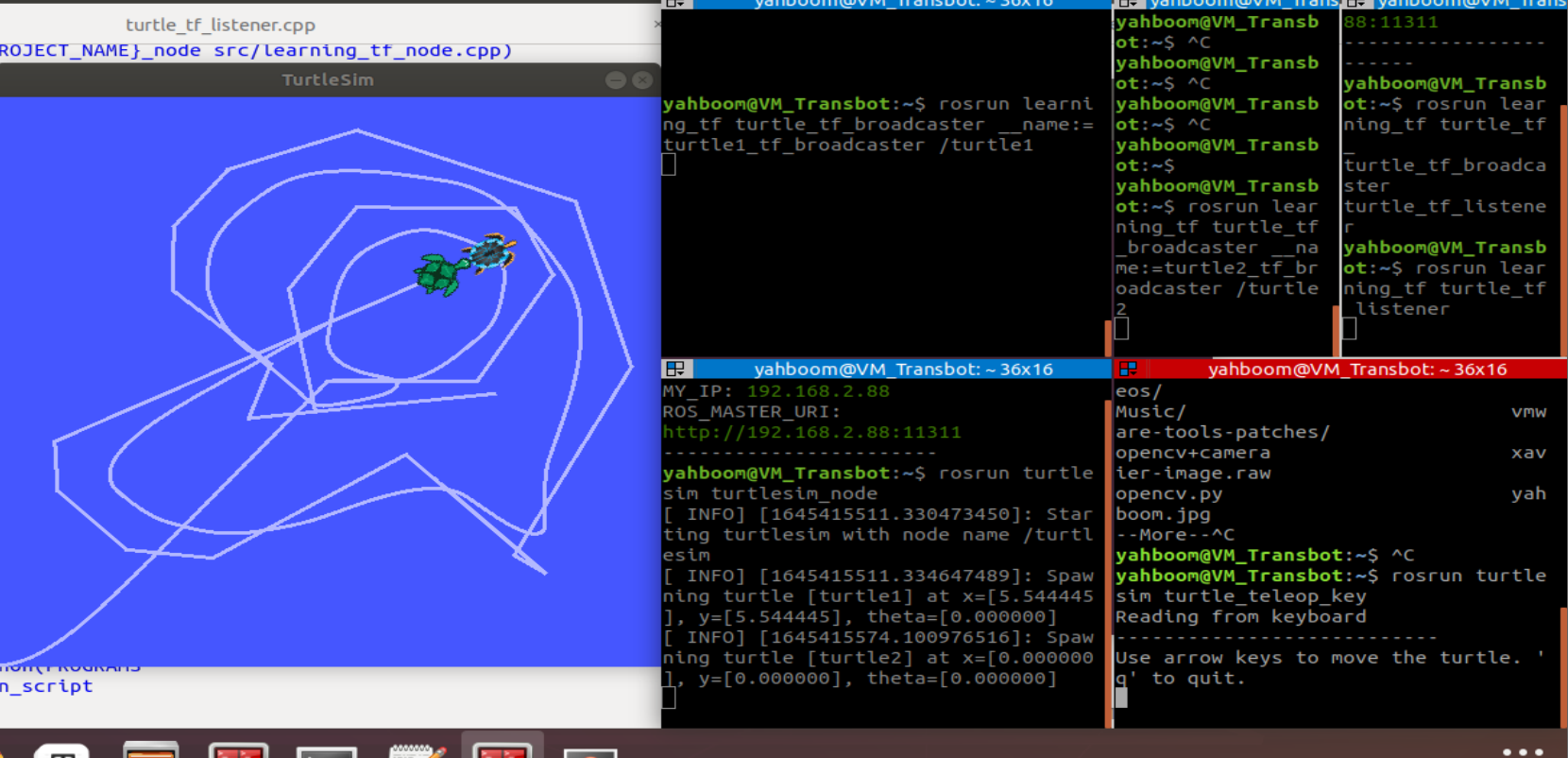
3)、程序说明
启动roscore后,开启小海龟节点,这时候终端会出现一只小海龟;然后我们发布两个tf变换,turtle1->world,turtle2->world,因为要想知道turtle2与turtle1之间的变化,则需要知道他们跟world之间的变换;然后,开启tf监听程序,这时候会发现终端产生了另外一只小海龟turtle2,并且turtle2会向turtle1移动;然后,我们打开键盘控制,通过按下方向键来控制turtle1移动,然后turtle2会追着turtle1移动。
10.2.7、Python语言实现tf广播器
1)、在功能包learning_tf,创建一个文件夹script,切换到该目录下,新建一个.py文件,命名为turtle_tf_broadcaster.py
2)、把下边的程序代码复制粘贴到turtle_tf_broadcaster.py文件中
xxxxxxxxxx#!/usr/bin/env python# -*- coding: utf-8 -*-
import roslibroslib.load_manifest('learning_tf')import rospy
import tfimport turtlesim.msg
def handle_turtle_pose(msg, turtlename): br = tf.TransformBroadcaster()#定义一个tf广播 #广播world与输入命名的turtle之间的tf变换 br.sendTransform((msg.x, msg.y, 0), tf.transformations.quaternion_from_euler(0, 0, msg.theta), rospy.Time.now(), turtlename, "world")
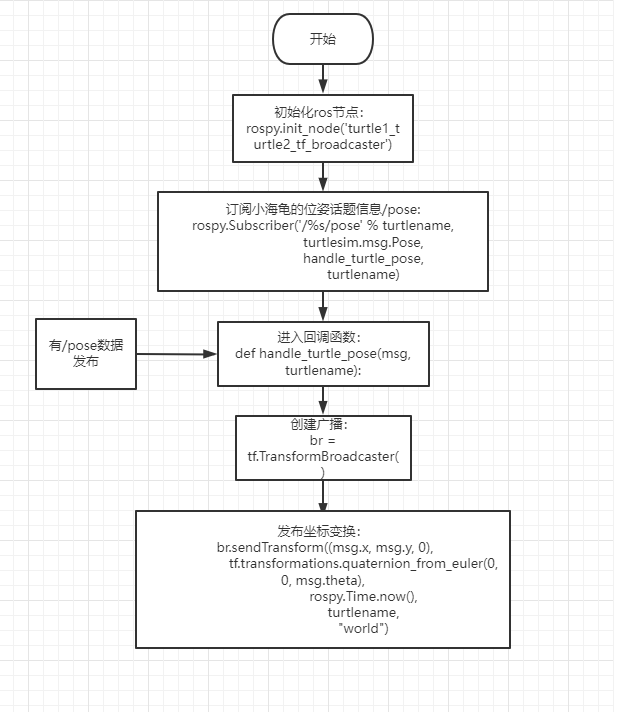
if __name__ == '__main__': rospy.init_node('turtle1_turtle2_tf_broadcaster')#初始化ros节点 turtlename = rospy.get_param('~turtle') #从参数服务器中获取turtle的名字 #订阅/pose话题数据,也就是turtle的位姿信息 rospy.Subscriber('/%s/pose' % turtlename, turtlesim.msg.Pose, handle_turtle_pose, turtlename) rospy.spin()3)、程序流程图
10.2.8、Python语言实现tf监听器
1)、在功能包learning_tf的script文件夹,创建一个python文件(文件后缀为.py),命名为turtle_tf_listener.py
2)、把下边的程序代码复制粘贴到turtle_tf_listener.py文件中
xxxxxxxxxx#!/usr/bin/env python# -*- coding: utf-8 -*-
import rospyimport mathimport tfimport geometry_msgs.msgimport turtlesim.srv
if __name__ == '__main__': rospy.init_node('turtle_tf_listener')#初始化ros节点
listener = tf.TransformListener()#初始化一个监听者
rospy.wait_for_service('spawn') #调用服务产生另一只海龟turtle2 spawner = rospy.ServiceProxy('spawn', turtlesim.srv.Spawn) spawner(8, 6, 0, 'turtle2') #声明一个发布者,用来发布turtle2的速度 turtle_vel = rospy.Publisher('turtle2/cmd_vel', geometry_msgs.msg.Twist,queue_size=1)
rate = rospy.Rate(10.0) while not rospy.is_shutdown(): try: #查找turtle2和turtle1之间的tf变化 (trans,rot) = listener.lookupTransform('/turtle2', '/turtle1', rospy.Time(0)) except (tf.LookupException, tf.ConnectivityException, tf.ExtrapolationException): continue #通过数学计算,算出线速度和角速度,然后发布出去 angular = 6.0 * math.atan2(trans[1], trans[0]) linear = 0.8 * math.sqrt(trans[0] ** 2 + trans[1] ** 2) cmd = geometry_msgs.msg.Twist() cmd.linear.x = linear cmd.angular.z = angular turtle_vel.publish(cmd) rate.sleep()3)、程序流程图
10.2.9、启动与运行效果展示
1)、编写一个launch文件
在功能包目录下,新建一个文件夹launch,切换至launch里边,新建一个launch文件,命名为start_tf_demo_py.launch,把以下内容复制到里边,
xxxxxxxxxx<launch>
<!-- 海龟节点--> <node pkg="turtlesim" type="turtlesim_node" name="sim"/> <!--广播turtle1->world--> <node name="turtle1_tf_broadcaster" pkg="learning_tf" type="turtle_tf_broadcaster.py" respawn="false" output="screen" > <param name="turtle" type="string" value="turtle1" /> </node> <!--广播turtle2->world--> <node name="turtle2_tf_broadcaster" pkg="learning_tf" type="turtle_tf_broadcaster.py" respawn="false" output="screen" > <param name="turtle" type="string" value="turtle2" /> </node> <!--监听--> <node pkg="learning_tf" type="turtle_tf_listener.py" name="listener" /> <!--海龟键盘控制节点--> <node pkg="turtlesim" type="turtle_teleop_key" name="teleop" output="screen"/></launch>
2)、启动
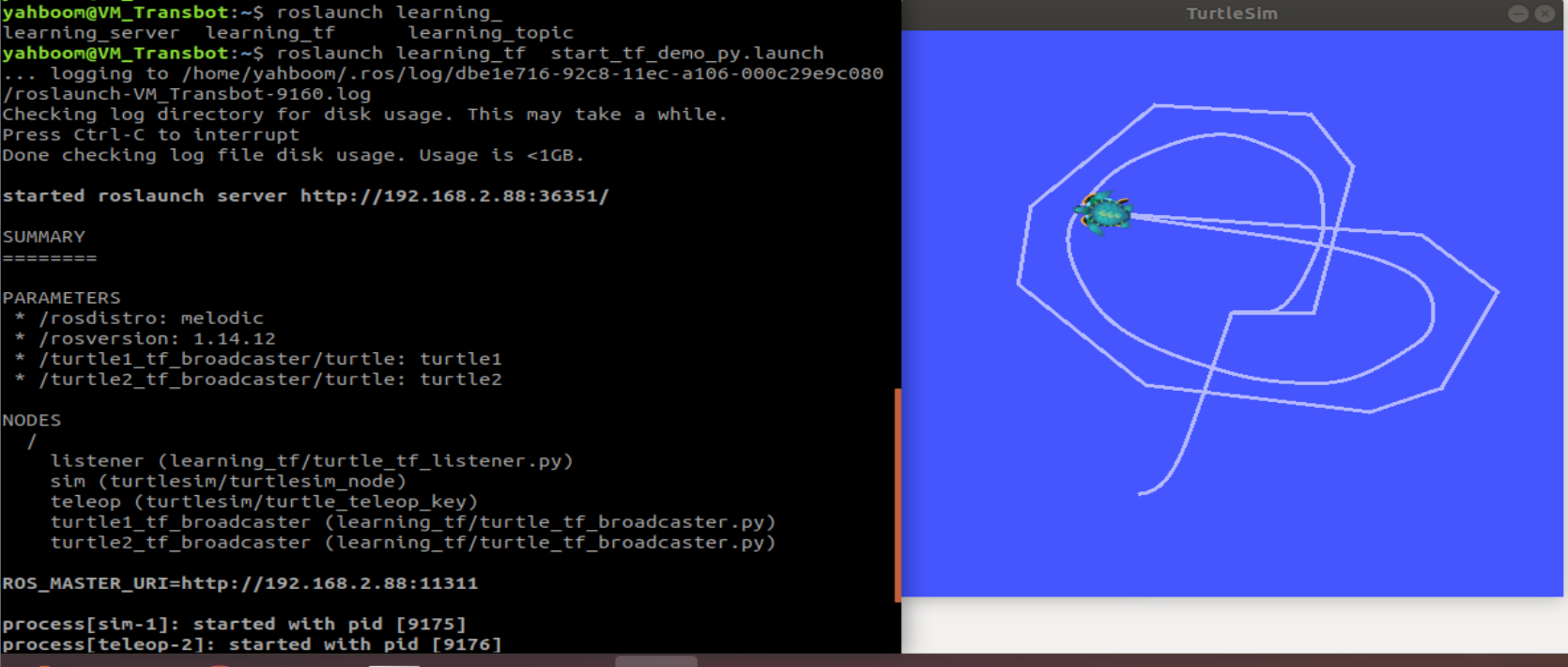
xxxxxxxxxxroslaunch learning_tf start_tf_demo_py.launch
程序运行后,鼠标点击运行launch的窗口,按下方向键,turtle2会跟着turtle1移动。
3)、运行结果如下图