首次使用-设置机器类型和雷达型号
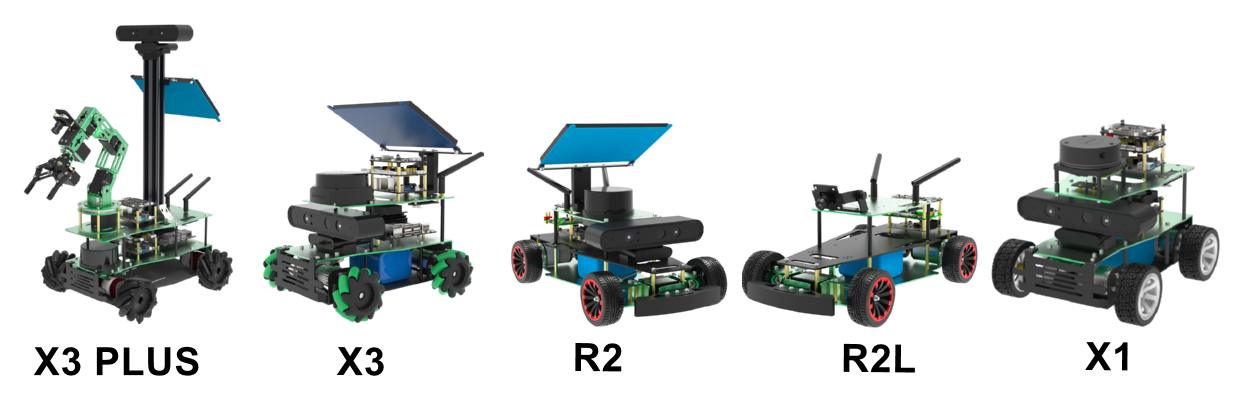
说明:由于ROSMASTER系列机器人分为多款机器人以及多款设备,出厂系统已配置多款设备的例程,但由于无法自动识别产品,所以需要手动设置机器类型和雷达型号。
设置机器类型有两种方式,第一种是通过运行脚本程序修改,第二种是使用手机APP连接并控制小车,APP会自动根据选择设置小车类型。
(方式二不适用pi5!!)
方式一、修改ROS环境的小车型号和雷达型号
1.打开小车系统的终端
#树莓派5主控需要先进入docker,多执行此步骤#如果运行脚本进入docker失败,请参考ROS/07、Docker教程~/run_docker.sh2.设置车型号和雷达型号,目前X3车型选配两款雷达,所以需要根据选配的雷达选择运行的命令,X3-PLUS车型只有一款雷达,所以不需要区分雷达。
如果是X3型号,系统默认是X3车型+A1雷达,请按照下面方式设置成X3车型+A1雷达。
xxxxxxxxxxsh ~/Rosmaster/RobotType/set_X3_A1.sh
如果是X3型号,系统默认是X3车型+S2雷达,请按照下面方式设置成X3车型+S2雷达。
xxxxxxxxxxsh ~/Rosmaster/RobotType/set_X3_S2.sh
如果是X3PLUS型号,请按照下面方式设置成X3PLUS车型。
xxxxxxxxxxsh ~/Rosmaster/RobotType/set_X3Plus.sh
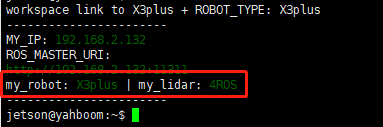
3.检查是否生效,关闭终端,重新打开,看看是否打印对应的产品型号。