关闭开机自启动手柄控制
注:树莓派需要与microROS控制板ROS_DOMAIN_ID需要一致,可以查看【MicroROS控制板参数配置】来设置microROS控制板ROS_DOMAIN_ID,查看教程【连接MicroROS代理】判断ID是否一致。
1、程序功能说明
小车连接上代理,把手柄的接收器接入树莓派5端口,进入docker,提供临时关闭手柄自启动的方法和永久关闭的方法。
2、启动并连接代理
成功启动树莓派之后,输入以下指令启动代理,
sh ~/start_agent_rpi5.sh
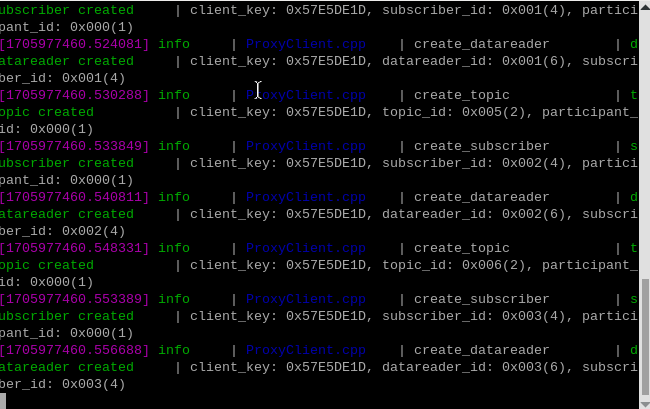
然后,打开小车开关,等待小车连接上代理,连接成功如下图所示,
3、进入小车docker
打开另一个终端输入以下指令进入docker,
xxxxxxxxxxsh ros2_humble.sh
出现以下界面就是进入docker成功,现在即可通过指令控制小车,

终端输入以下指令查看是否正常挂载手柄,
xxxxxxxxxxls /dev/input*
出现这个界面,就是成功挂载上了。

4、启动手柄控制程序
4.1、临时关闭手柄自启动功能
因为开机已经自启动了手柄控制功能,如果我们需要手动开启手柄控制就需要把开机自启动的进程关掉。这个也是临时关闭自启动手柄控制的方法。
终端输入指令:
xxxxxxxxxxps -A
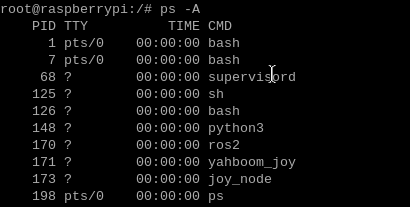
能看到手柄控制节点和手柄节点的进程为171和173,把这两个进程关掉就能手动启动手柄控制
xxxxxxxxxxkill -9 171kill -9 173
这样即可把手柄功能关掉。
4.2、永久关闭手柄自启动功能
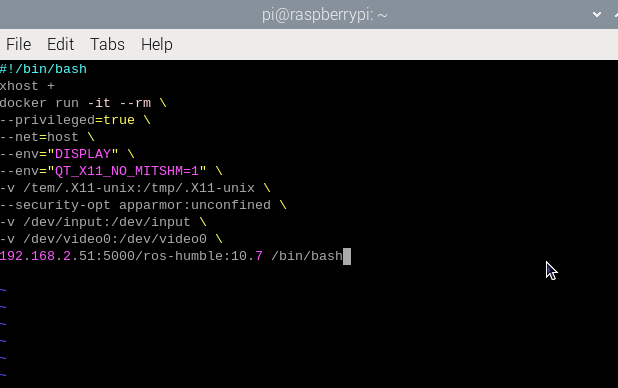
永久关闭需要修改进去docker的脚本文件
打开一个树莓派终端输入,
xxxxxxxxxxvi ros2_humble.sh
出现这个界面
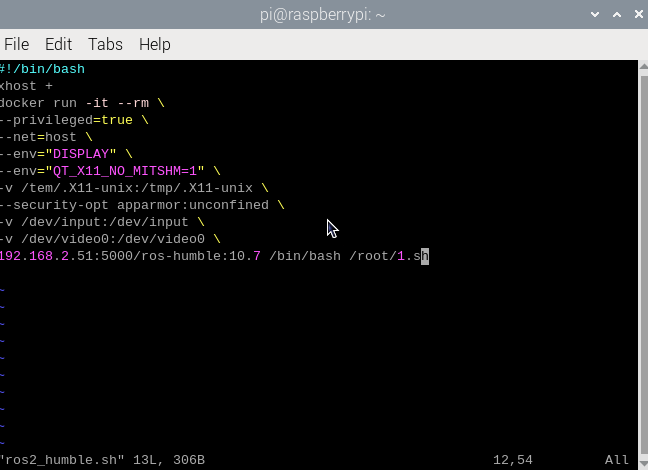
要关闭开机自启动手柄,只需要把/root/1.sh这个指令删掉即可,关掉之后要是想恢复开机自启动手柄,再加上即可。
下图这个脚本文件,开机就不会自启动手柄控制。