快速启动键盘控制
注:树莓派需要与microROS控制板ROS_DOMAIN_ID需要一致,可以查看【MicroROS控制板参数配置】来设置microROS控制板ROS_DOMAIN_ID,查看教程【连接MicroROS代理】判断ID是否一致。
1、程序功能说明
小车连接上代理后,会发布雷达、imu等传感器数据,可以在配套的虚拟机/树莓派5中,运行命令去查询这些信息,也可以发布速度、蜂鸣器等传感器的控制数据。
2、查询小车信息
2.1、启动并连接代理
树莓派成功开机后,打开终端输入以下指令打开代理,
sh ~/start_agent_rpi5.sh

按下microROS控制板的复位按键,等待小车连接上代理,连接成功如下图所示。
2.2、进入小车docker
打开另一个终端输入以下指令进入docker,
xxxxxxxxxxsh ros2_humble.sh
出现以下界面就是进入docker成功,现在即可通过指令控制小车,

终端输入以下指令查询代理节点,
xxxxxxxxxxros2 node list

3、启动键盘控制程序
在docker终端输入以下指令,即可使用键盘控制小车,
xxxxxxxxxxros2 run yahboomcar_ctrl yahboom_keyboard
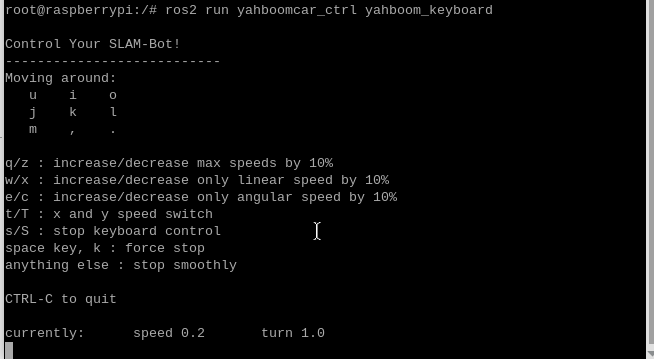
然后,根据下边说明,按下相对应的按键,即可控制小车运动,
【i】:往前走 【,】:往后退
【l】:右自转 【j】:左自转
【u】:左转 【o】:右转
【m】:左后倒车 【.】:右后到车