开机自启动手柄控制
1、接线
按照教程安装好小车,连接好Type-C数据线、手柄接收器以及USB摄像头,如下图:
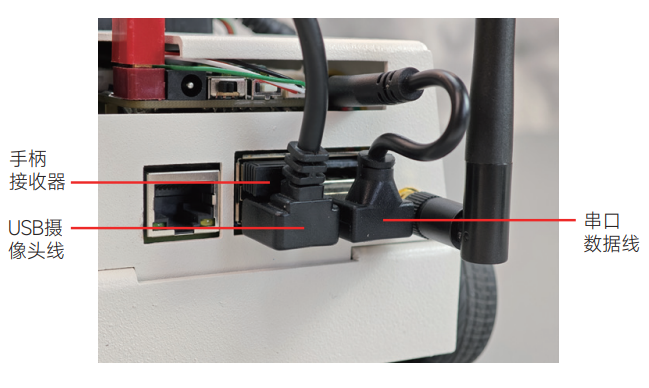
打开电源开关,我们就可以快速体验手柄控制!
2、启动
小车启动大概30s左右,可以按一下手柄的START键,如果小车的蜂鸣器发出滴滴响声,说明可以使用手柄控制。
如果没有蜂鸣器响声,有可能是ROS控制板固件不对或者代理没有连接成功!常见的是代理没有连接成功,可以按一下MicroROS控制板上的RESET按键,然后等待30秒左右。最准确的解决办法:可以参考后面的远程控制教程,直接进入树莓派系统查看
正式使用USB手柄控制前需要按一下R1按键。

| 按键 | 属性 |
|---|---|
| 左摇杆上 | 小车前进 |
| 左摇杆下 | 小车后退 |
| 右摇杆右 | 小车右转 |
| 右摇杆左 | 小车左转 |
| X | 舵机往左 |
| B | 舵机往右 |
| A | 舵机往下 |
| Y | 舵机往上 |
3、个人环境自启动问题
3.1进入小车docker
打开另一个终端输入以下指令进入docker,
xxxxxxxxxxsh ros2_humble.sh
出现以下界面就是进入docker成功,现在即可通过指令控制小车,

终端输入以下指令查看是否正常挂载手柄,
xxxxxxxxxxls /dev/input*
出现这个界面,就是成功挂载上了。

如果microros参数配置了其他id的话(默认是20),需要到程序修改成对应的 ID才能自启动手柄控制
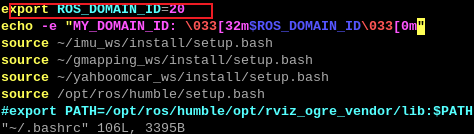
3.2修改.bashrc文件的ID成自己的ID
终端输入,这里以20为例子
xxxxxxxxxxvi ~/.bashrc
3.3修改自启动服务
终端输入,这里以20为例子
xxxxxxxxxxvi /usr/lib/systemd/system/supervisor.service
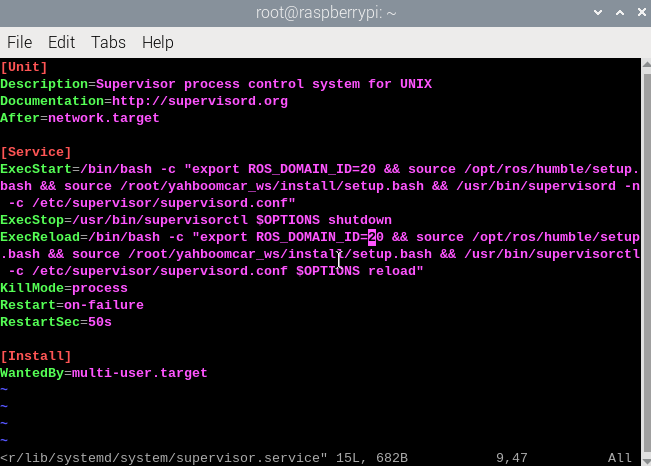
修改文件两处地方的id成对应的id,保存退出即可。
3.4提交设置了新ID的docker。
打开一个新的终端输入
xxxxxxxxxxdocker ps -a
图中可以知道,刚刚修改的docker的id是bfe7cdaccb2d,

终端继续输入以下指令即可提交一个新docker,
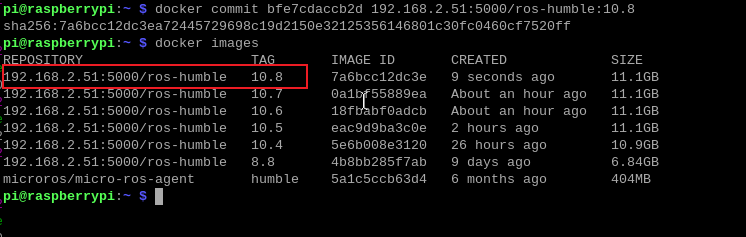
xxxxxxxxxxdocker commit bfe7cdaccb2d 192.168.2.51:5000/ros-humble:10.8
参数有,
需要提交docker的id:bfe7cdaccb2d
以及提交之后新的docker名称:192.168.2.51:5000/ros-humble:10.8
输入指令,查看是否提交成功
xxxxxxxxxxdocker images
出现这个10.8就是提交成功了。
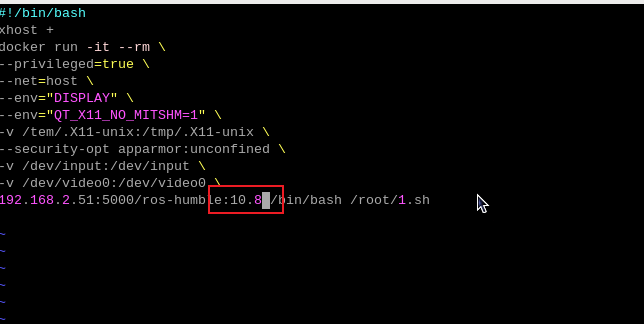
3.5修改自启动脚本里的docker版本
修改成功,既可以使用自己do_main_id版本的docker,进行手柄自启动
终端输入
xxxxxxxxxxvi ros2_humble.sh
可以看到修改成了自己提交的docker版本,保存退出。重新开机启动即可使用手柄自启动。