1、ROS2简介
1、ROS2概述
ROS2是第二代的Robot Operating System,ROS1的升级版本,解决了ROS1存在的一些问题。ROS2最早出现的版本Arden是在2017年,随着版本的迭代,不断地更新玉优化,现如今已经有了稳定的版本。与ROS1相通过,Linux版本与ROS2版本的选择也是有关系的,两者对应的版本如下,
| ROS2版本 | Ubuntu版本 |
|---|---|
| Foxy | Ubuntu20.04 |
| Galactic | Ubuntu20.04 |
| Humble | Ubuntu22.04 |
根据自己的Linux版本,下载对应的ROS2版本,本产品课程以Foxy版本为基础。
2、ROS2特性
2.1、ROS2全面支持三种平台
Ubuntu
Mac OS X
Windows 10
2.2、实现了分布式架构
取消Master中央节点,实现节点的分布式发现,发布/订阅,请求/响应通讯。
2.3、支持实时
2.4、使用新版本的编程语言
C++11
Python3.5+
2.5、使用了新的编译系统Ament(ROS为Catkin)
2.6、ROS1可以通过rosbridge和ROS 2通信
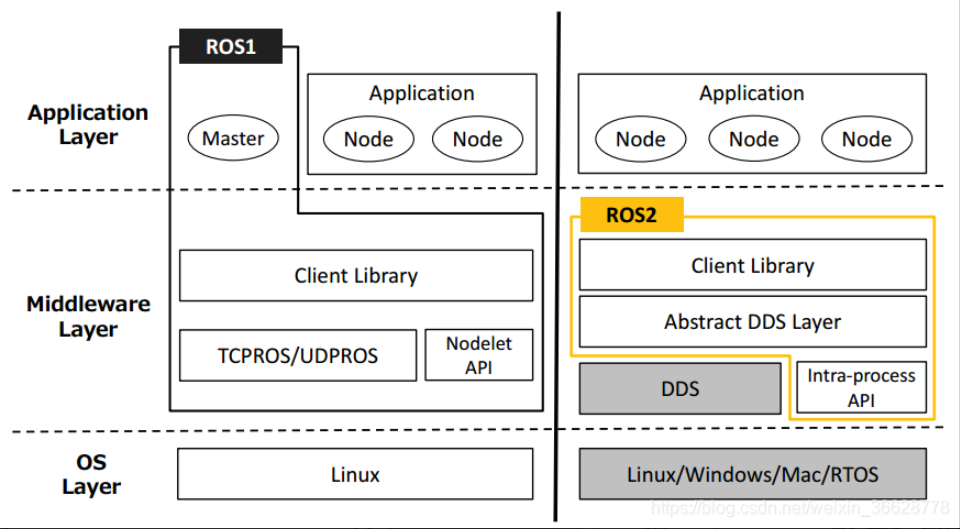
3、ROS2与ROS1的区别
3.1、平台
ROS1目前来说仅支持在Linux系统中运行使用,常见的是在Ubuntu中搭建使用。而ROS2目前在Ubuntu、Windows甚至嵌入式开发板上都可以搭建使用,平台更加广泛。
3.2、语言
C++
ROS1的核心是C++03,而ROS2广泛使用C++11。
Python
ROS1的Python使用版本是Python2,而ROS2使用的Python版本至少是3.5以上,Foxy使用的Python版本是3.8。
3.3、中间件
ROS1启动前需要开启roscore,这个master掌握所有的节点之间的通讯,而ROS2则没有,只有一个抽象的中间件接口,通过该接口进行传输数据。。目前,此接口的所有实现都基于 DDS 标准。这使得 ROS 2 能够提供各种优质的 Qos 服务策略,从而改善不同网络的通信。
3.4、编译命令
ROS1的编译命令是catkin_make,而ROS2的编译命令使用colcon build命令。