1.机器人为何要配置参数?
答:由于每个用户的WiFi环境和IP地址不同,所以需要根据实际情况配置参数。
2.关于microROS控制板小车类型,树莓派版本与虚拟机/电脑版本有什么不同?
答:树莓派版本与虚拟机/电脑版本使用的是相同的出厂固件,通过配置参数来区分版本,树莓派版本使用串口通讯方式,虚拟机/电脑使用WiFi-UDP通讯方式。
3.配置成树莓派版本后,无法读写配置参数怎么办?
答:请按一下机器人的复位键,在开机后5秒内为配置状态(MCU指示灯每300毫秒闪一次),此时运行配置文件即可正常读写配置。
4.microROS控制板有两个type-C口,有什么区别?
答:标记Serial的type-C接口主要用来通讯、配置、烧录固件等,标记5V OUT的type-C接口是用来给树莓派5供电的。
5.机器人蜂鸣器持续‘滴滴滴’响是怎么回事?
答:机器人在电池电量低的情况下会发出‘滴滴滴’响声(每间隔100毫秒响一次),此时无法控制机器人,请保存代码关机,然后给机器人充电。
6.机器人MCU状态指示灯代表的意义?
答:底板单片机开机进入配置状态,大约5秒后,自动进入连接代理状态,连接代理成功后,开始初始化ROS相关话题,如果microROS错误则自动结束结束microROS任务,如果microROS初始化完成则进入正常状态。
| LED灯指示功能 | LED灯现象 |
|---|---|
| 配置状态 | LED灯闪烁(每间隔300毫秒闪烁一次) |
| 连接代理状态 | LED灯慢闪(每间隔1秒闪烁一次) |
| microROS错误 | LED灯快闪(每间隔50毫秒闪烁一次) |
| 正常状态 | LED灯双闪(每3秒快闪2次) |
| 低电压状态 | LED灯快闪(每间隔100毫秒闪烁一次) |
7.同个局域网内有多台机器人怎么避免干扰?
答:可以通过设置不同的ROS_DOMAIN_ID来避免干扰。ROS_DOMAIN_ID的设置范围:0~101。请修改config_robot.py文件里的set_ros_domain_id(20)参数,并将配置写入microROS控制板。然后在虚拟机/电脑用户目录下.bashrc文件增加一行"export ROS_DOMAIN_ID=20 ",保存并重启终端。
8.建图导航的时候出现无法获取实时的TF变换?
答:重新按下复位键,重新连接代理。
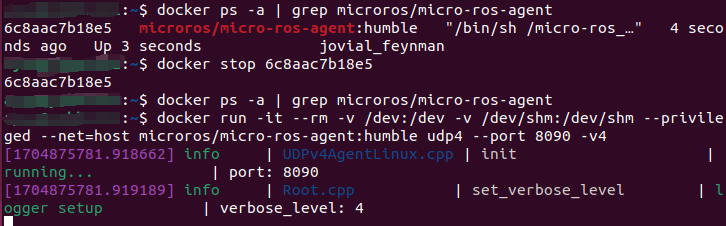
9.开启microROS代理显示error怎么办?

答:microROS代理只能在一个终端开启,如果已经有终端在后台开启microROS代理,再次开启代理就会报错,请先在原来的代理终端按Ctrl+C退出代理后再运行代理。如果是非正常关闭代理导致docker进程在后台运行,请先查询出当前docker进行号,并结束当前代理docker进程,再运行代理。
docker ps -a | grep microros/micro-ros-agentdocker stop xxxxxxxxxxdocker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged --net=host microros/micro-ros-agent:humble udp4 --port 8090 -v4