1、扩展板介绍
声明:
ROS驱动板功能教程主要以ROS扩展板的资源为主,部分使用的元器件(如PWM舵机、串口舵机等)是RDK-X3-Robot机器人小车不包含的,
1.1、扩展板正面元件分布示意图
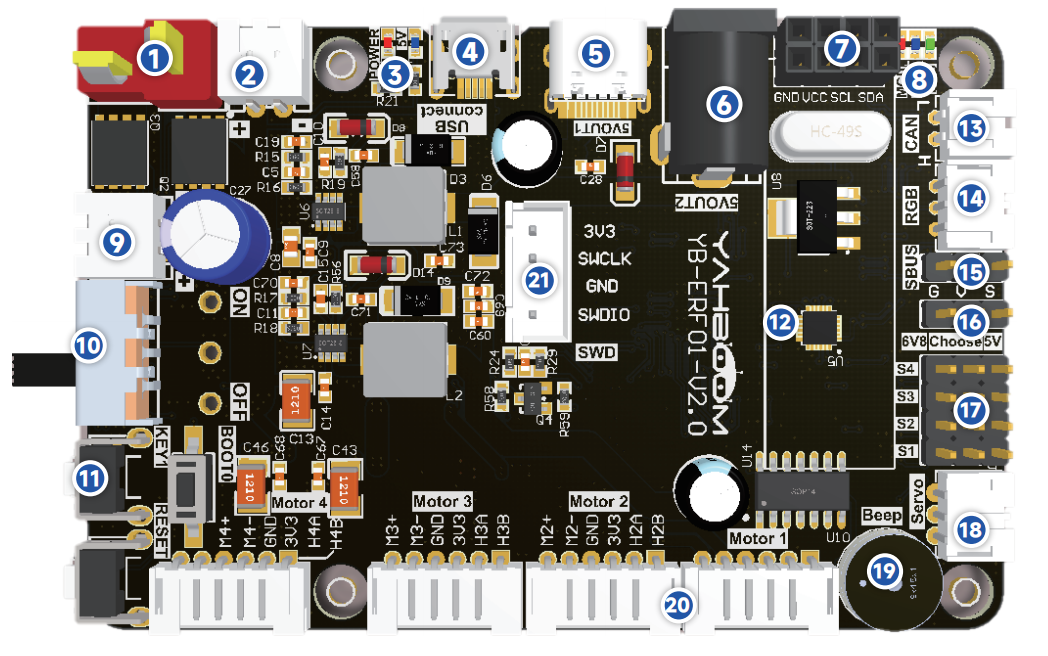
①T型DC 8V电源输入接口:作为扩展板的主电源输入,连接到DC 8V电源或者8V电池。
②⑨DC 8V电源输出:向外提供DC 8V电源。
③电源指示灯:指示电源供电是否正常。
④micro USB数据接口:连接主机通讯和烧录程序。
⑤type-C接口:向外提供DC 5V,仅供电不能通讯。
⑥DC 5V输出接口:可给Jetson Nano供电。
⑦I2C接口:可连接外部I2C设备,例如OLED屏幕。
⑧指示灯:数据指示灯和6.8V电压指示灯。
⑩DC 8V电源开关:电源总开关。
⑪按键:按键KEY1:用户功能按键,可通过编程实现自定义功能。按键RESET:板载单片机复位按键。按键BOOT0:板载单片机BOOT0键,用于单片机进入烧录模式。
⑫九轴姿态传感器:提供扩展板当前姿态。
⑬CAN接口:连接CAN设备。
⑭RGB炫彩灯条接口:连接RGB炫彩灯条。
⑮SBUS接口:连接航模遥控器接收器。
⑯PWM舵机电压切换:改变跳线帽的位置可选择6.8V或者5V电压为PWM舵机供电。
⑰PWM舵机接口:可连接6.8V或者5V电压PWM舵机,需根据舵机电压在⑯选择对应的电压。
⑱串口舵机接口:连接到串口舵机机械臂。
⑲蜂鸣器:用于鸣笛报警。
⑳四路电机连接口:连接四个电机,根据不同车型连接方式请参考对应课程文档。
㉑SWD 调试接口:连接到 ST-Link 或者 J-Link 上 SW 接口,用于调试单片机或者下载单片机固件。
1.2、扩展板背面元件分布示意图
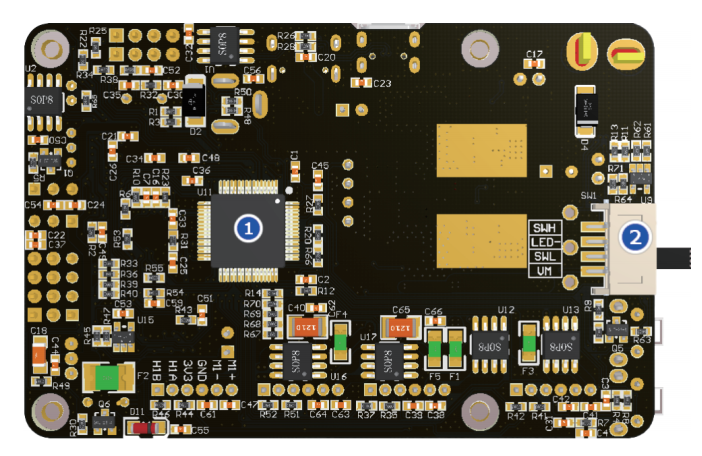
①板载单片机:主要负责控制扩展板上的外设,例如蜂鸣器、电机驱动等。
②金属按键开关 PH2.0 接口:可外接金属开关,与板载电源开关并联,只需要打开其中一个开关,就可以打开电源。