1、准备工作
1.1、编译并安装YDLidar-SDK
把功能包文件夹下的YDLidar-SDK,拷贝到终端目录下,进入该文件夹,终端输入,
cd YDLidar-SDKmkdir buildcd buildcmake ..makesudo make install1.2、建立一个ROS工作空间
1.2.1、以工作空间名字为ydlidar_ws为例子,终端输入,
xxxxxxxxxxmkdir ydlidar_wscd ydlidar_wsmkdir srccd srccatkin_init_workspacecd ..catkin_make1.2.2、把工作空间加入系统环境变量,终端输入,
xxxxxxxxxxecho "source ~/ydlidar_ws/devel/setup.bash" >> ~/.bashrcsource ~/.bashrc1.3、把功能包加入工作空间
把功能包文件夹下的src目录下的所有文件复制到刚才建立的工作空间的src文件夹下,然后在工作空间目录下,打开终端输入,
xxxxxxxxxxcatkin_make 1.4、创建串行端口别名
这一步是绑定雷达的端口,避免多个usb设备接入时,识别端口错误。
xxxxxxxxxxchmod 0777 ~/ydlidar_ws/src/ydlidar_ros_driver/startup/*sudo sh src/ydlidar_ros_driver/startup/initenv.sh注意:完成之前的操作后,请再次重新插入 雷达。
1.5、运行 ydlidar_ros_driver
1.5.1、使用启动文件运行 ydlidar_ros_driver,终端输入,
xroslaunch ydlidar_ros_driver X2.launch
我们可以通过终端打印话题数据来查看雷达是否启动正常,终端输入,
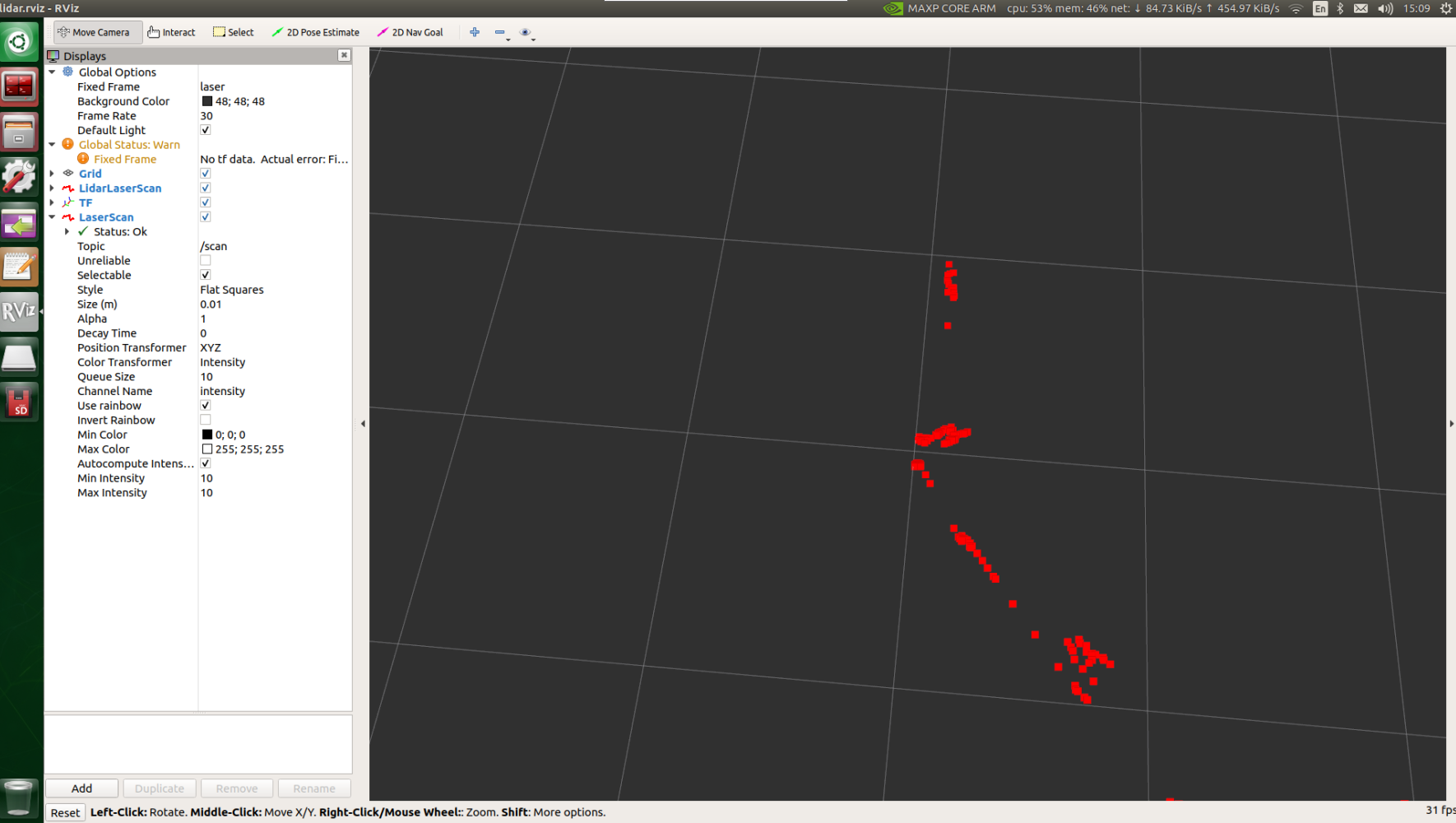
xxxxxxxxxxrostopic echo /scan1.5.2、RVIZ 查看扫描结果,终端输入,
xxxxxxxxxxroslaunch ydlidar_ros_driver lidar_view.launch