思岚雷达ROS2
注意:本节支持雷达的型号有:A1/A2/A3/S1/S2;A1/A2<115200>、A3/S1<256000>和S2<1000000>之间的波特率不同。
ROS 2官网:https://docs.ros.org/
激光雷达ROS2:https://www.slamtec.com/cn/Support#rplidar-a-series
激光雷达官网:http://www.slamtec.com/cn/Support
设备:pc;A1M8
环境:Ubuntu18.04;ROS2(eloquent)
新建工作空间
mkdir -p my_ws/src使用该雷达时,每次执行命令均需进入到工作空间下
xxxxxxxxxxcd ~/my_ws将【silanlidar_ros2.zip】功能包解压后放入自己的工作空间src文件夹下,在工作空间下打开终端
xxxxxxxxxxcolcon build # 编译source install/setup.bash # 更新环境注意:每一次新打开的终端均需要【更新环境】,每次修改功能包里面的代码均需重新【编译】再【更新环境】。
1、重新映射USB串口
该步骤需要在sllidar_ros2功能包scripts文件夹下,执行安装 USB 端口重映射命令
xxxxxxxxxxcd ~/my_ws/src/sllidar_ros2/scriptssudo chmod 777 *./create_udev_rules.sh使用以下命令查看修改重映射
xxxxxxxxxxls -l /dev | grep ttyUSB

2、终端测试;
第一步,启动相对应的雷达
xxxxxxxxxxros2 launch sllidar_ros2 sllidar_launch.py # RPLIDAR A1/A2ros2 launch sllidar_ros2 sllidar_a3_launch.py # RPLIDAR A3ros2 launch sllidar_ros2 sllidar_s1_launch.py # RPLIDAR S1ros2 launch sllidar_ros2 sllidar_s2_launch.py # RPLIDAR S2第二步,启动测试应用程序
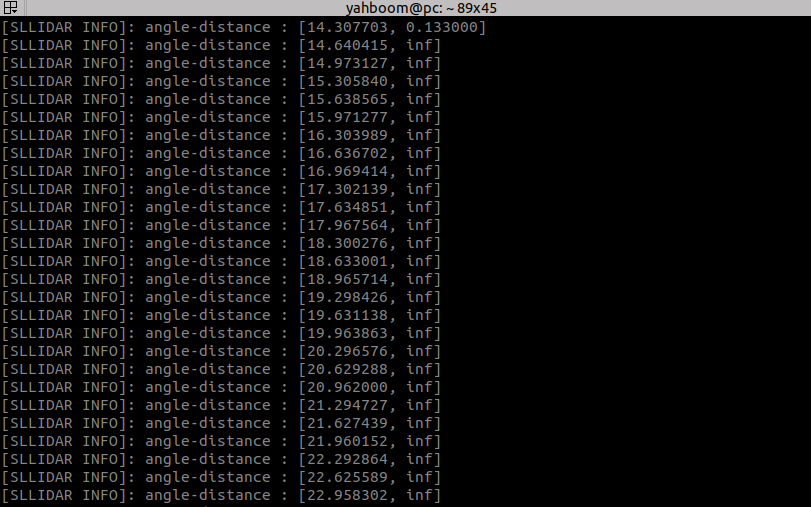
xxxxxxxxxxrosrun rplidar_ros rplidarNodeClient
您应该在控制台中看到 rplidar 的扫描结果
3、rviz2可视化测试
xxxxxxxxxxros2 launch sllidar_ros2 view_sllidar_launch.py # RPLIDAR A1/A2ros2 launch sllidar_ros2 view_sllidar_a3_launch.py # RPLIDAR A3ros2 launch sllidar_ros2 view_sllidar_s1_launch.py # RPLIDAR S1ros2 launch sllidar_ros2 view_sllidar_s2_launch.py # RPLIDAR S2您应该在 rviz2 中看到雷达的扫描结果
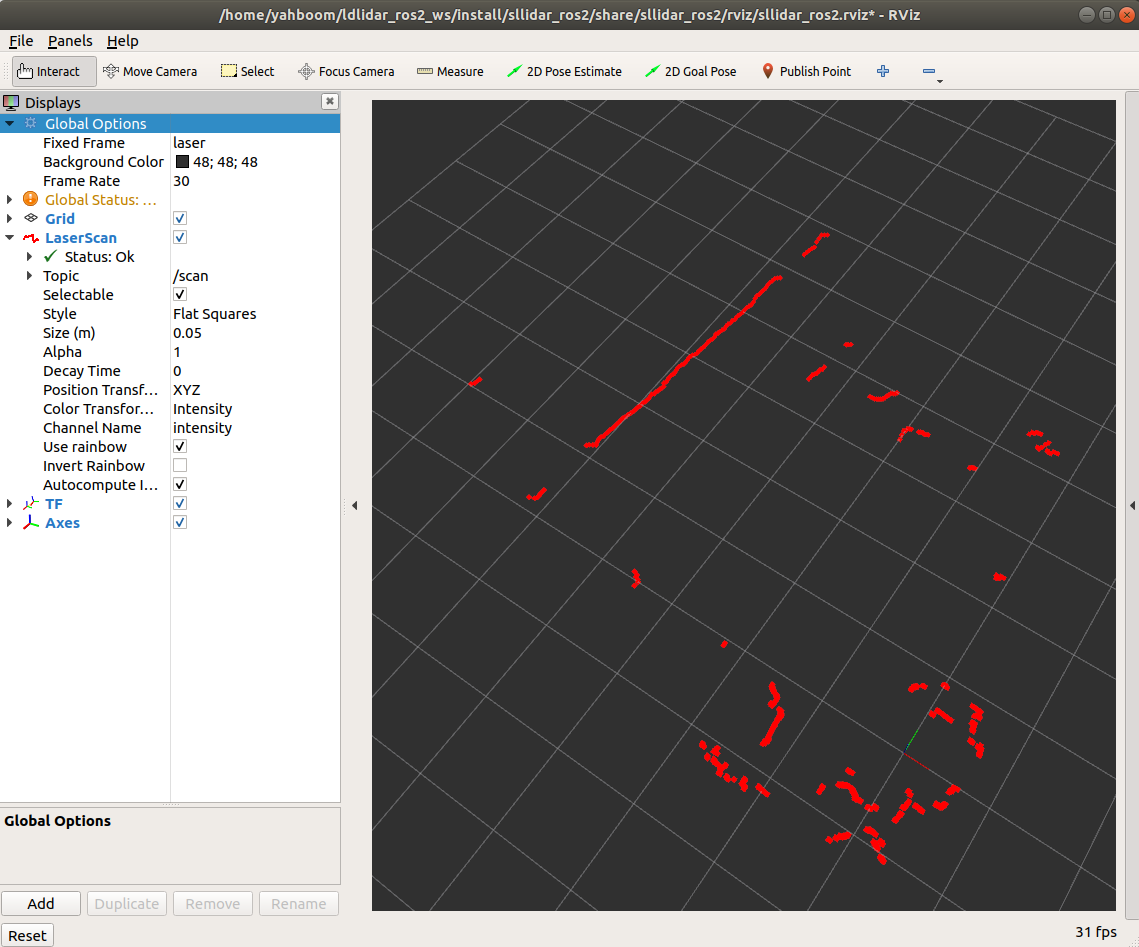
注意:【Fixed Frame】坐标系、【LaserScan】的话题要与发布的一致。
4、gmapping建图测试
第一步,启动相对应的雷达
xxxxxxxxxxros2 launch sllidar_ros2 sllidar_launch.py # RPLIDAR A1/A2ros2 launch sllidar_ros2 sllidar_a3_launch.py # RPLIDAR A3ros2 launch sllidar_ros2 sllidar_s1_launch.py # RPLIDAR S1ros2 launch sllidar_ros2 sllidar_s2_launch.py # RPLIDAR S2第二步,启动gmapping建图
xxxxxxxxxxros2 launch sllidar_ros2 gmapping_launch.py # 其他ros2 launch sllidar_ros2 gmapping_s2_launch.py # S2您应该在 rviz2 中看到建图结果
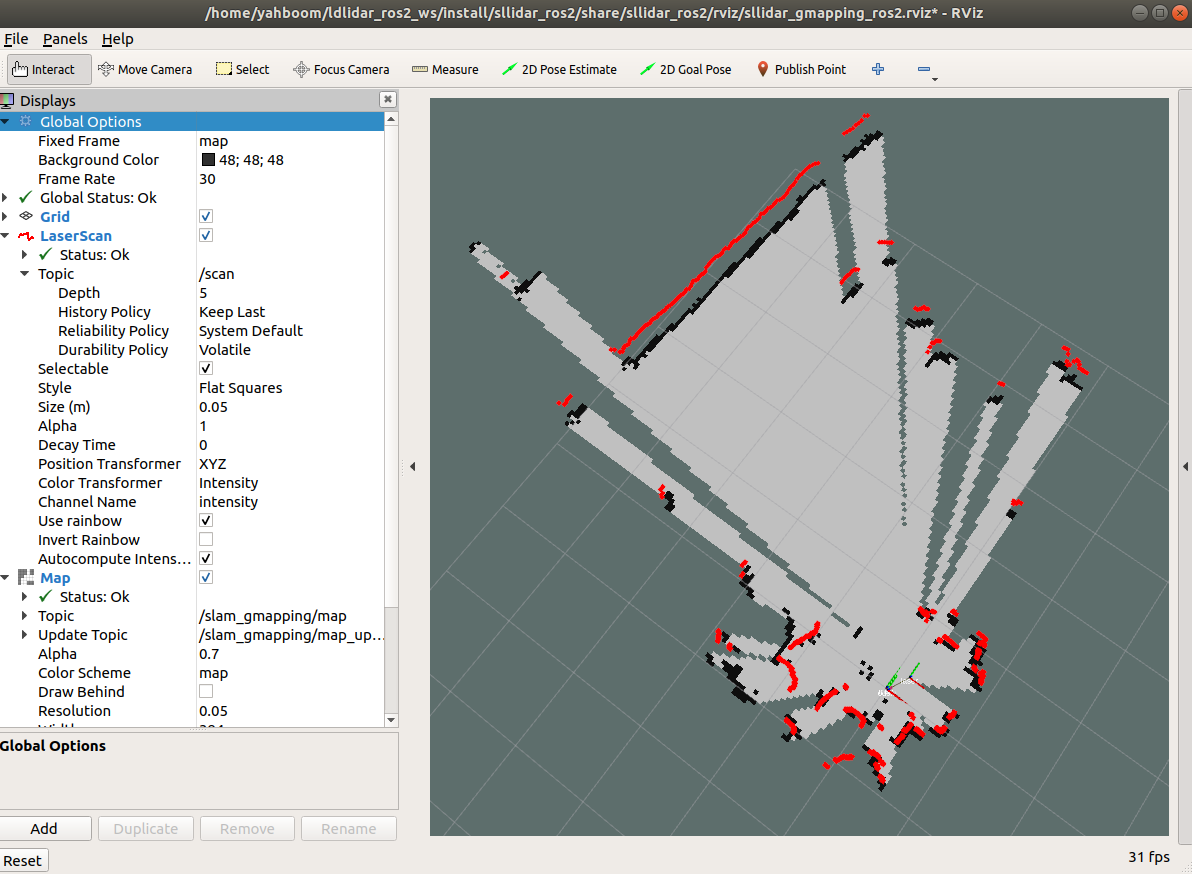
注意:【Fixed Frame】坐标系、【LaserScan】的话题、【map】的话题要与发布的一致。