3、上位机综合控制
3.1 开启上位机程序
打开jupyterLab客户端,找到代码路径:
xDOGZILLA/Samples/2_Control/9.dog_Ctrl.ipynb
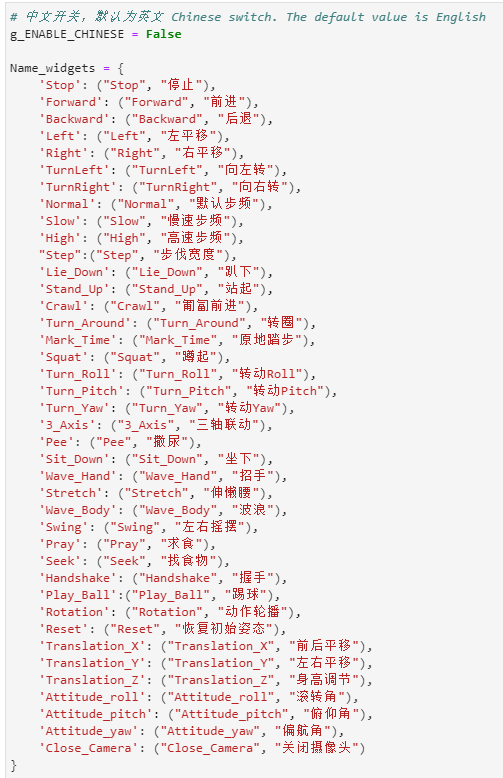
默认情况下g_ENABLE_CHINESE=False,如果需要显示中文,请设置g_ENABLE_CHINESE=True。
点击运行全部cell,然后拉到最底下,能看到生成的控件。

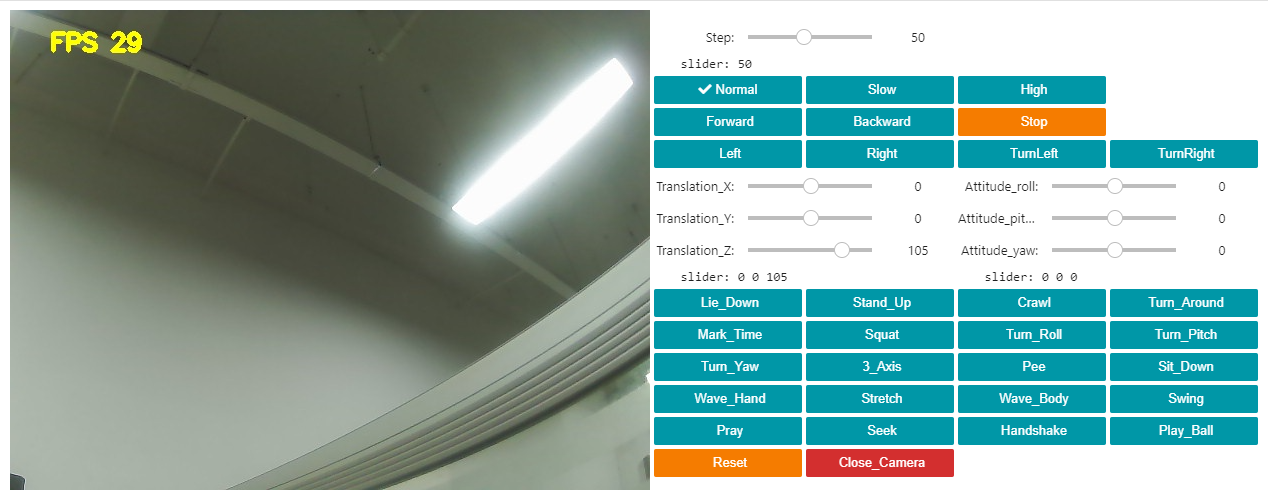
左边是摄像头显示画面,右边是控制机器狗的控件。
3.2 控件功能解释
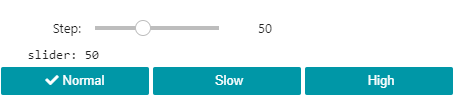
下方拖动条和按钮控制速度,拖动滑动条可以修改机器狗的步伐宽度,按钮可以修改机器狗的步伐频率。
下方按钮控制机器狗运动,运动速度取决于上方设置的速度参数。

translation滑动条在机器狗足端不动情况下,控制身体朝着X Y Z方向平移,其中Z方向可以控制身体高度。
attitude滑动条在机器狗足端不动情况下,控制身体的ROLL PITCH YAW姿态角度。

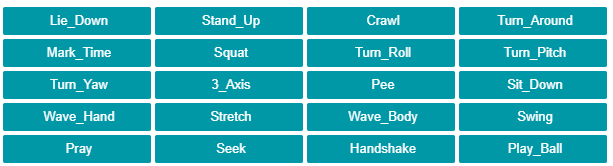
下方按钮控制机器狗的动作,内部预设多个动作可供表演。
最后是reset重置机器狗和控件。Close_Camera用于关闭摄像头进程,避免一直占用摄像头。
