IMU模块简介
IMU模块简介一、模块正面引脚功能说明二、模块背面三、版本区别四、产品特点五、传感器参数指标1.加速度计参数2.陀螺仪参数3.磁力计参数4.气压计参数5.俯仰角、横滚角参数6.航向角参数六.模块参数1.基本参数2.电器参数
- 该产品是基于MEMS技术的高性能三维运动姿态测量系统。它包含三轴陀螺仪、三轴加速度计,三轴电子罗盘运动传感器和气压计。通过集成各种高性能传感器和运用自主研发的姿态动力学核心算法引擎,结合高动态卡尔曼滤波融合算法,为客户提供高精度、高动态、实时补偿的三轴姿态角度,通过对各类数据的灵活选择配置,满足不同的应用场景。
- 领先的基于 Kalman 滤波原理并具有自主知识产权的传感器融合算法,可以实时提供高达 200Hz 更新率的数据,从而满足各种高精度的应用需求,实现准确的动作捕捉和姿态估计。产品内部集成自主研发的高精度校准和标定算法,提高产品的测量精度。
- 同时提供用户所需要的上位机、使用说明、开发手册、开发代码,使得针对各类需求的研发时间降至最低。
一、模块正面
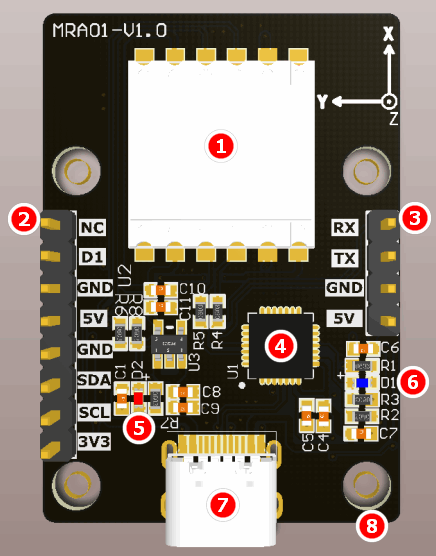
①IMU模块的核心模组:所有计算位姿都通过此核心模组完成。
②外接引脚:可连接GPS模块或者I2C设备。
③串口引脚:输出TTL信号,可与STM32等单片机通讯。
④CP2102芯片:USB转串口功能。
⑤D2指示灯:模块状态指示灯,模块正常情况下常亮。
⑥D1指示灯:CP2102状态指示灯,USB在通讯时点亮,空闲时熄灭。
⑦Type-C接口:连接到模块的串口,做为通讯接口使用。
⑧固定铜柱:用于安装金属外壳或者安装GPS模块。
引脚功能说明
| NC | 空 |
|---|---|
| D1 | 连接GPS模块的数据接口 |
| GND | 接地 |
| 5V | 5V |
| GND | 接地 |
| SDA | I2C-串行数据线 |
| SCL | I2C-串行时钟线 |
| 3V3 | 3.3V |
| RX | 串口-数据接收引脚 |
| TX | 串口-数据发送引脚 |
| GND | 接地 |
| 5V | 5V |
二、模块背面
三、版本区别
IMU模块有分裸机版本和带金属外壳版本,金属外壳版本出厂已经安装好外壳,裸机版本可以通过串口连接到STM32等单片机使用、也可以通过USB数据线与树莓派连接。装上金属外壳后只能使用USB通讯。


四、产品特点
- 模块集成高精度的陀螺仪、加速度计、地磁场传感器和气压计,采用高性能的微处理器和先进的动力学解算与卡尔曼动态滤波算法,能够快速求解出模块当前的实时运动姿态。
- 采用先进的数字滤波技术,能有效降低测量噪声,提高测量精度。
- 模块内部集成了姿态解算器,配合动态卡尔曼滤波算法,能够在动态环境下准确输出模块的当前姿态, 姿态测量精度静态 0.05 度,动态 0.1 度,稳定性极高,性能甚至优于某些专业的倾角仪。
- Z轴航向角加入地磁传感器滤波融合,解决了6轴算法中,由于陀螺仪积分的漂移引起的累计误差,可长期稳定输出航向角数据。注意:要由于有磁场检测,使用前需要校准,而且使用时需要远离磁干扰区域、电子设备、磁铁、扬声器等硬磁性物体至少20cm的距离。
- 模块内部自带电压稳定电路,工作电压3.3~5V,引脚电平兼容3.3V/5V的嵌入式系统,连接方便。
- 支持串口和IIC两种数字接口。方便用户选择最佳的连接方式。串口速率4800bps~921600bps可调,IIC接口支持全速400K速率。
- 最高200Hz数据输出速率。输出内容可以自由选择,输出速率0.2~200Hz可调节。
- 保留4路扩展端口,可以分别配置为模拟输入,数字输入,数字输出等功能。
- 具备GPS连接能力。可接受符合NMEA-0183标准的串口GPS数据,形成GPS-IMU组合导航单元。
五、传感器参数指标
1.加速度计参数
| 参数 | 条件 | 典型值 |
|---|---|---|
| 量程 | ±16g | |
| 分辨率 | ±16g | 0.0005(g/LSB) |
| RMS噪声 | 带宽=100Hz | 0.75~1mg-rms |
| 静止零漂 | 水平放置 | ±20~40mg |
| 温漂 | -40°C ~ +85°C | ±0.15mg/℃ |
| 带宽 | 5~256Hz |
2.陀螺仪参数
| 参数 | 条件 | 典型值 |
|---|---|---|
| 量程 | ±2000°/s | |
| 分辨率 | ±2000°/s | 0.061(°/s)/(LSB) |
| RMS噪声 | 带宽=100Hz | 0.028~0.07(°/s)-rms |
| 静止零漂 | 水平放置 | ±0.5~1°/s |
| 温漂 | -40°C ~ +85°C | ±0.005~0.015 (°/s)/℃ |
| 带宽 | 5~256Hz |
3.磁力计参数
| 参数 | 条件 | 典型值 |
|---|---|---|
| 量程 | ±2Gauss | |
| 分辨率 | ±2Gauss | 0.0667mGauss/LSB |
4.气压计参数
| 参数 | 条件 | 典型值 |
|---|---|---|
| 量程 | 300~1100hPa | |
| RMS噪声 | 标准模式 | 0.5Pa-RMS |
| 相对精度 | ±0.06hPa |
5.俯仰角、横滚角参数
| 参数 | 条件 | 典型值 |
|---|---|---|
| 量程 | X:±180°,Y:±90° | |
| 倾角精度 | 静态 | 0.1° |
| 倾角精度 | 动态 | 0.5° |
| 分辨率 | 水平放置 | 0.0055° |
| 温漂 | -40°C ~ +85°C | ±0.5~1° |
6.航向角参数
| 参数 | 条件 | 典型值 |
|---|---|---|
| 量程 | Z:±180° | |
| 航向精度 | 9轴算法,磁场校准,动/静态 | 1°(不受磁场干扰情况下)【1】 |
| 航向精度 | 6轴算法,静态 | 0.5°(动态存在积分累计误差)【2】 |
| 分辨率 | 水平放置 | 0.0055° |
注:
【1】使用前请在测试的环境进行磁场校准,确保传感器熟悉该环境下的磁场,校准时,请远离磁干扰
【2】在有些震动环境下,会有累计误差,具体误差不可估计,具体根据实际测试为准
六.模块参数
1.基本参数
| 参数 | 备注 |
|---|---|
| 串口通讯接口 | 默认波特率9600bps,可选择4800bps~921600bps |
| I2C接口 | 硬件I2C最高支持400KHz,软件I2C最高支持100KHz |
| 输出内容 | 片上时间、3轴加速度、3轴角速度、3轴磁场、3轴角度、四元数、端口状态、气压、高度 |
| 输出速率 | 默认10Hz,可选择0.2Hz~200Hz |
| 启动时间 | 1000ms |
| 工作温度 | -40℃~85℃ |
| 储存温度 | -40℃~100℃ |
| 耐冲击 | 20kg(裸板) |
2.电器参数
| 参数 | 条件 | 数值 |
|---|---|---|
| VCC供电电压 | 3.3V/5V | |
| 工作电流 | 5V | 12mA |
| 休眠电流 | 5V | 15uA |