1 、使用ROS功能包前,需要保证已经安装好了固件库,可以参考“Python基础控制课程”的第三节的内容-安装Rosmaster驱动库
2、创建,初始化,编译一个ROS工作空间(driver_ws为例)
终端输入,
mkdir driver_wscd driver_wsmkdir srccd srccatkin_init_workspacecd ..catkin_make
3、把功能包文件夹下的src里的内容,粘贴到ROS工作空间的src文件夹中
xxxxxxxxxxcd ~/driver_ws/src
4、回到工作空间目录,终端输入catkin_make编译工作空间
xxxxxxxxxxcd ~/driver_wscatkin_make
5、 没提示错误就完成编译
注意:有提前创建好的工作空间,就只需要把src内容复制到工作空间的src文件下,在工作空间目录下catkin_make编译即可。
6、添加功能包路径到环境变量中
终端输入,
xxxxxxxxxxsudo gedit ./.bashr
把下边的内容,粘贴到文件末端,
xxxxxxxxxxsource /home/yahboom/driver_ws/devel/setup.bash --extend7、保存,退出,然后重新打开一个终端,输入
xxxxxxxxxxsource ./.bashr
可能会出现的问题归纳:
1、使用功能包的时候,如果出现文件权限无法执行的情况,例如提示错误,
xxxxxxxxxxERROR: cannot launch node of type [yahboomcar_bringup/Mcnamu_driver.py]: Cannot locate node of type [Mcnamu_driver.py] in package [yahboomcar_bringup]. Make sure file exists in package path and permission is set to executable (chmod +x)

这是因为没有给python文件赋予执行权限。解决方法是给执行权限,在文件目录 下打开一个终端,输入,
xxxxxxxxxxsudo chmod 777 *
2、使用catkin_makes编译的时候,可能会出现ros环境中的一些依赖没有安装,例如以下情况,
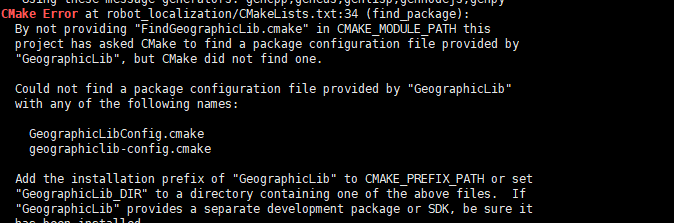
解决方法是安装这些依赖,终端输入,
xxxxxxxxxxsudo apt-get install ros-melodic-缺少的依赖
这里的melodic是ros版本号,按照自己安装的ros版本号进行修改;缺少的依赖也是根据实际情况修改,例如以上所示,就是要输入,
xxxxxxxxxxsudo apt install ros-melodic-geographic-*
*号表示安装该依赖的所有文件。安装完后,再重新编译。