4、蜂鸣器鸣笛
4.1、实验目标
控制扩展板上的蜂鸣器开关,鸣笛时间100毫秒,300毫秒,1秒等。
4.2、实验准备
图片中红色方框为扩展板上的蜂鸣器。
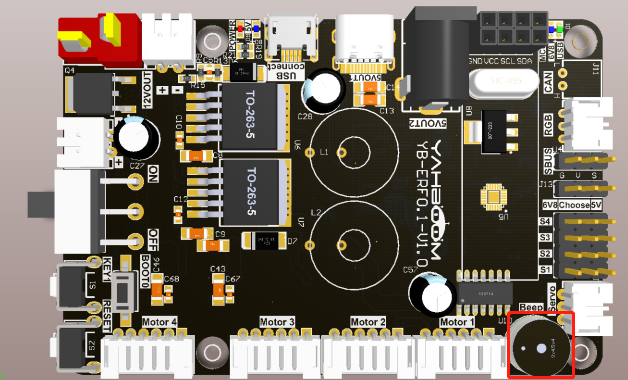
扩展板上的蜂鸣器是有源蜂鸣器,所以控制起来比较简单,请查看以下函数。
控制蜂鸣器需要用到的Rosmaster_Lib库函数:
set_beep(on_time)参数解释:on_time=0:关闭,on_time=1:一直响,on_time>=10:响xx毫秒后自动关闭(on_time是10的倍数)。
返回值:无。
4.3、实验操作和现象
请查看课程配套视频。
4.4、程序源码
将机器人打开电源开机,并打开Jetson Nano或者远程电脑的浏览器进入Jupyter lab编辑器。
参考代码路径:Rosmaster/Samples/4.beep.ipynb