线上课程
产品中心
解决方案
动态分享
线上商城
∨
天猫旗舰店
京东旗舰店
软件下载
∨
控制软件
编程软件
关于我们
×
暂无结果
Jetson Orin NANO SUPER
课程资料
资料汇总下载
百度网盘使用教程
提取码获取
官方商城
搜索
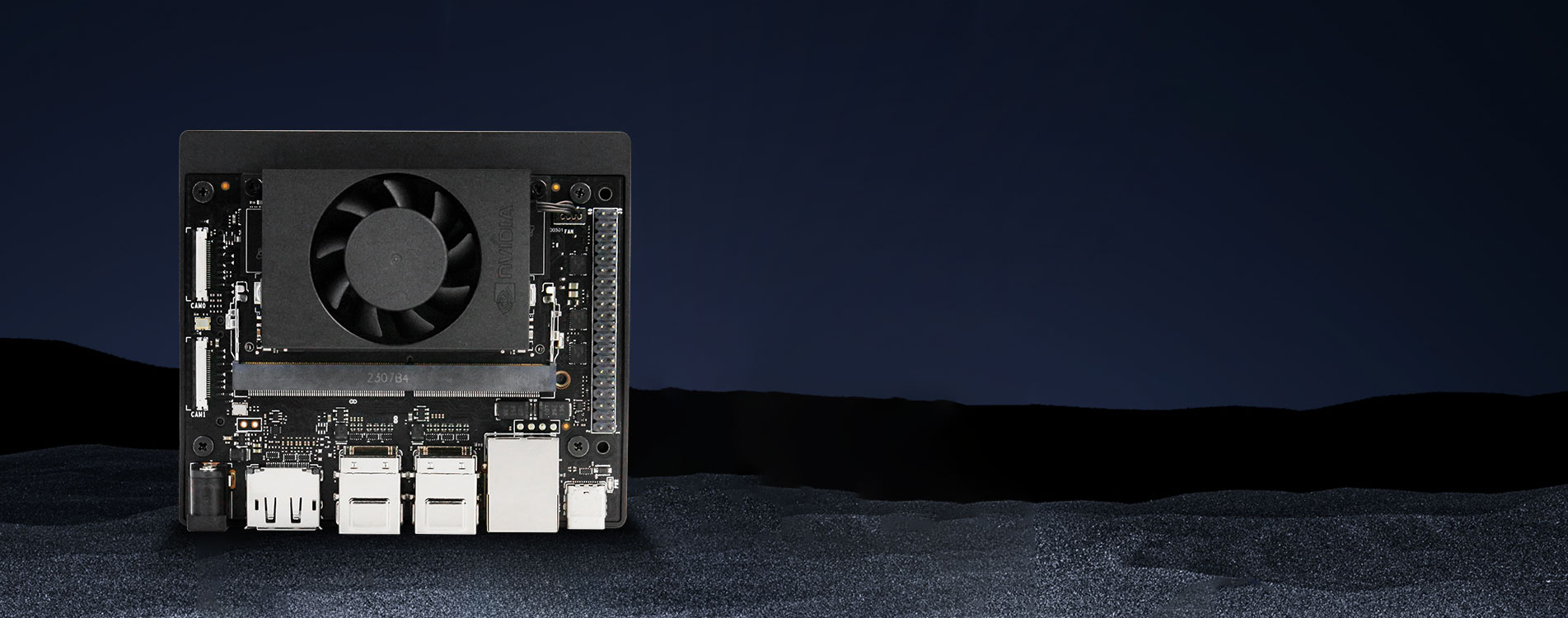
Jetson Orin NANO SUPER
•全新升级Jetson Orin Nano SUPER
•SUPER算力提升70%,高达67TOPS
•CPU频率提升13%,升至1.7 GHz
•GPU频率提升63%,升至1020MHz
观看视频
×
产品功能演示
开箱评测
第一章 快速上手
01.学习路线
02.快速上手
第二章 主板基础
01.主板介绍
02.烧录Jetson纯净系统
03.安装Jetson组件环境
04.备份固态硬盘系统
05.恢复出厂镜像系统
06.烧写SUPER官方纯净系统
07.烧录SUPER引导(官方套件必看)
08.固态硬盘扩容
09.Jetpack旧系统升级亚博SUPER出厂系统
第三章 基础使用
01.基础知识
02.网络配置
03.SSH远程登录
04.VNC远程控制
05.文件远程传输
06.中文输入法
07.Jtop工具使用
08.交换空间扩容
09.VSCode使用
10.VMware使用
第四章 GPIO控制
01.GPIO介绍
02.GPIO库安装
03.GPIO读取功能
04.GPIO输出功能
05.串口通讯功能
06.I2C通讯功能
第五章 视觉基础
01.CSI摄像头预览
02.USB摄像头预览
03.Jupyter Lab使用
04.JetCam使用
第六章 OpenCV基础
01.图像读取
02.图像保存
03.图像修改
04.图像缩放
05.图像剪裁
06.图像平移
07.图像镜像
08.图像灰度化
09.图像二值化
10.图像边缘检测
11.图像添加线段
12.图像添加矩形
13.图像添加圆形
14.图像添加椭圆
15.图像添加多边形
16.图像添加文本
17.预览USB摄像头画面
18.预览CSI摄像头画面
第七章 视觉进阶
01.环境搭建
01.TensorFlow环境搭建
02.PyTorch环境搭建
03.Torchvision环境搭建
02.DeepStream开发
01.DeepStream环境搭建
02.四类检测(交通)
03.YOLO11开发
01.YOLO环境搭建
02.CLI使用
03.物体检测
04.实例分割
05.姿态估计
06.图像分类
07.定向物体检测
08.模型转换
09.数据集标注
10.模型训练_转换
11.模型预测
04.Mediapipe开发
01.Mediapipe环境搭建
02.手部检测
03.人脸检测
04.人脸特效
05.三维物体识别
06.虚拟画笔
07.手势识别
08.手指控制
09.姿态估计
10.人脸面具
11.整体检测
12.背景消除(人)
05.QR二维码识别
QR二维码识别
第八章 Docker基础
01.Docker初识
02.Docker安装
03.Docker命令
04.Docker使用
05.Docker交互
第九章 ROS1-Melodic
01.ROS1基础教程
01.ROS1简介
02.项目文件结构
03.常用命令与工具
04.发布者
05.订阅者
06.自定义话题消息与使用
07.客户端
08.服务端
09.自定义服务消息与使用
10.TF发布与监听
02.ROS1视觉应用
00.使用必看
01.摄像头预览画面
02.QR二维码
03.人体姿态估计
04.目标检测
05.AR视觉
06.Opencv应用
07.ROS+Opencv基础
08.Mediapipe开发
第十章 ROS2-Humble
01.ROS2基础教程
01.ROS2简介
02.ROS2常用命令与工具
03.ROS2话题通讯
04.ROS2服务通讯
05.ROS2launch文件启动
02.ROS2视觉应用
01.摄像头预览(USB)
02.摄像头预览(CSI)
03.摄像头校准(USB)
04.摄像头校准(CSI)
05.AR视觉(USB)
06.AR视觉(CSI)
第十一章 离线AI大模型开发
01.AI大模型环境部署
02.大模型对话平台安装
03.Meta AI:Llama3模型
04.阿里云:Qwen2模型
05.微软:Phi-3模型
06.谷歌:Gemma模型
07.微软:WizardLM2模型
08.Meta AI:Codellama模型
09.DeepSeek:DeepSeek-R1模型
10.Orca Mini模型
11.StarCoder2模型
12.TinyLlama模型
13.拓展之视觉多模态大语言模型(LLaVA)
14.拓展之视觉多模态大语言模型(LLaVA-Phi3)
ROS专用配件
ROS机器人控制板
YDLIDAR 4ROS激光雷达
思岚激光雷达
YDLIDAR X3 Pro激光雷达
T-mini Plus激光雷达
Astra Pro深度相机
Gemini2深度相机
Gemini 335深度相机
REALSENSE实感深度相机
GPS&北斗定位模块
10轴IMU惯导模块
远场麦克风阵列模块
配件资料
Jetson Orin 亚克力外壳
Jetson全系CSI摄像头
Jetson系列铝合金机箱外壳
高帧率广角摄像头
15.6寸触摸显示器
7寸触摸屏
USB麦克风摄像头
Jetson迷你机箱
有问必答
提问:
目录
第一章 快速上手
第二章 主板基础
第三章 基础使用
第四章 GPIO控制
第五章 视觉基础
第六章 OpenCV基础
第七章 视觉进阶
第八章 Docker基础
第九章 ROS1-Melodic
第十章 ROS2-Humble
第十一章 离线AI大模型开发
ROS专用配件
配件资料
有问必答


 01.主板介绍
01.主板介绍 






