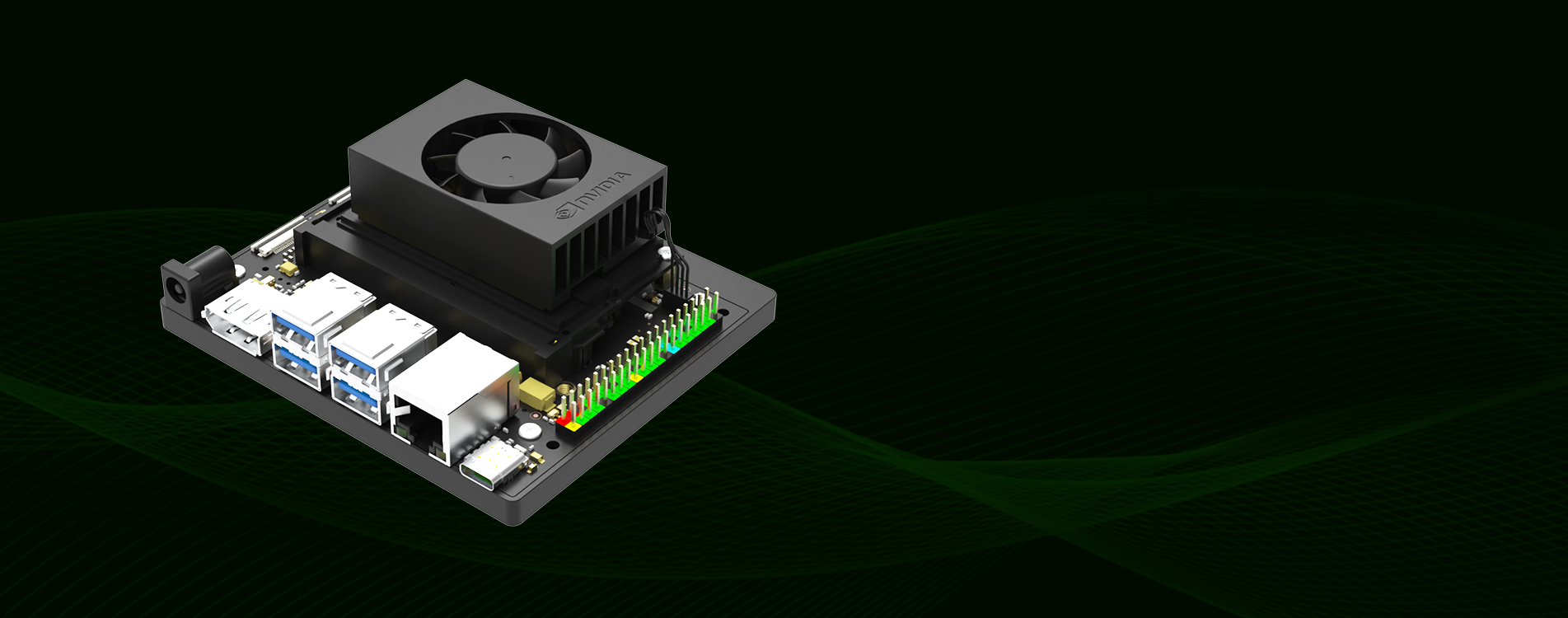
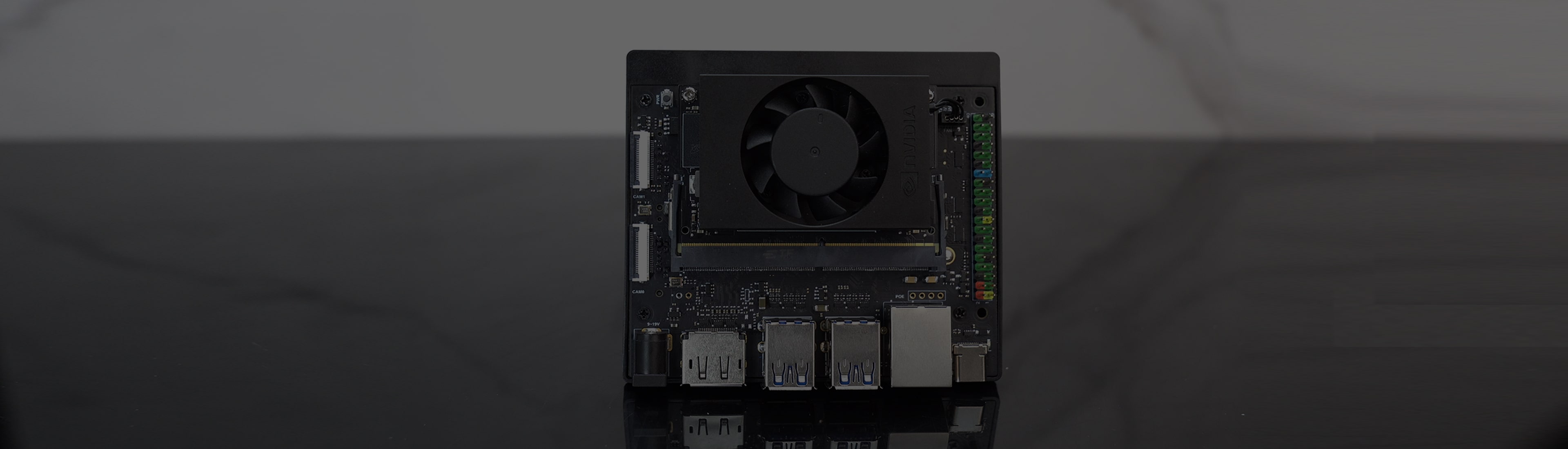
Jetson Orin NANO
•全新一代ORIN NANO核心模组•4GB/8GB内存可选
•20/40TOPS,算力提升40~80倍
•采用官方载板方案,满足功耗
 2.Jupter lab和Jetcham安装
3.安装TensorFlow(选看)
4.安装Torch&&Torchvision(选看)
5.jetson-inference环境搭建(选看)
6.Hello AI World
7.图像分类推理
8.训练图像分类模型
9.目标检测推理
10.训练对象检测模型
11.语义分割
12.动作识别
13.姿态估计
14.背景去除
15.单眼深度估计
16.DeepStream环境搭建(选看)
17.汽车检测
18.姿态检测
19.yolo5简介
20.yolo5的环境搭建(选看)
21.yolo5的实时检测
22.yolo5+tensorrt加速
23.yolo5+tensorrt加速+DeepStream(打开摄像头)
24.Mediapipe环境搭建(选看)
25.Mediapipe开发
2.Jupter lab和Jetcham安装
3.安装TensorFlow(选看)
4.安装Torch&&Torchvision(选看)
5.jetson-inference环境搭建(选看)
6.Hello AI World
7.图像分类推理
8.训练图像分类模型
9.目标检测推理
10.训练对象检测模型
11.语义分割
12.动作识别
13.姿态估计
14.背景去除
15.单眼深度估计
16.DeepStream环境搭建(选看)
17.汽车检测
18.姿态检测
19.yolo5简介
20.yolo5的环境搭建(选看)
21.yolo5的实时检测
22.yolo5+tensorrt加速
23.yolo5+tensorrt加速+DeepStream(打开摄像头)
24.Mediapipe环境搭建(选看)
25.Mediapipe开发











回复:您好,可以的,可以跑7~8B左右的llama、qwen大模型。